轴功能使用预定义的命令结构来执行。
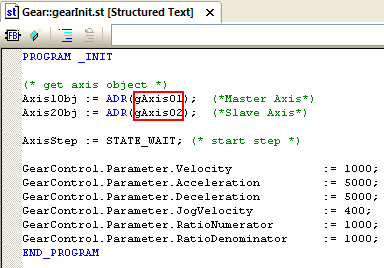
默认情况下,轴 在软件包(运动向导)中被命名 为gAxis01 (主)和 gAxis02 (从)。如果要为轴使用不同的名称,可以在Init-SP中指定:
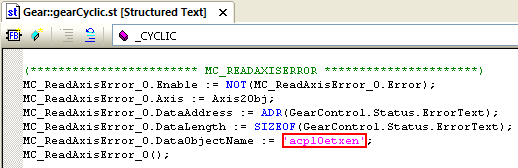
默认情况下,错误文本被命名为 acp10etxen (运动向导)。如果应该使用不同的名称,可以在程序的循环部分进行更改。
Automation Studio变量观察窗口将被用来执行控制操作。为了正确使用它, 必须在逻辑视图中选择 LibACP10MC_Gear_ST 软件包。双击 它所包含的 gearCyclic.st 程序,然后点击放大镜图标或按 <CTRL>+M 开始监视模式。
然后, GearControl 变量被加入到观察窗口。
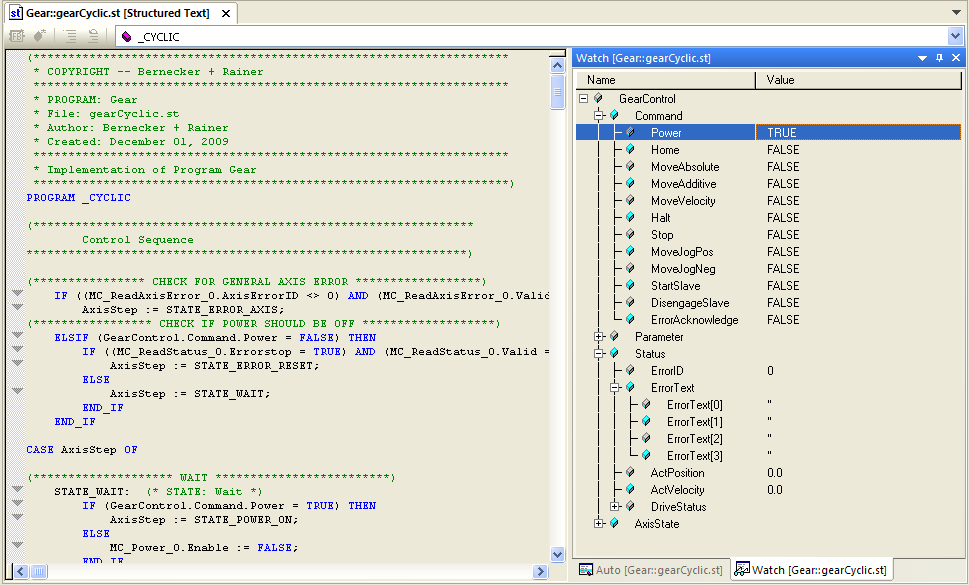
GearControl.Command的子元素 用于 控制伺服驱动器。
名称 |
描述 |
Command(命令) |
该结构的这一元素允许发布命令。一些例子包括。伺服控制器上电,轴回零,确认错误,启动/停止各种运动和启动/脱离从轴。 |
Parameters(参数) |
该元素包含特定功能的驱动参数。一些例子包括。速度、加速度、路径,等等。 |
Status(状态) |
该元素提供关于当前状态的信息。这些信息包括。当前速度、当前位置、错误描述和伺服驱动器的各种状态,如triger输入和硬件限位开关的状态。 |
AxisState(轴状态) |
该元素提供关于轴的状态的信息。 |
该变量包含所有相关信息/参数,分为以下四类:
功能 |
变量 |
从轴伺服控制器上电 |
GearControl.Command.Power |
执行从轴回零流程 |
GearControl.Command.Home |
在主轴和从轴之间启动一个简单的电子齿轮耦合 |
GearControl.Command.StartSlave |
解除从轴和主轴的耦合 |
GearControl.Command.DisengageSlave |
只要命令变量被置位,就在从轴上执行正方向的运动(正向点动) |
GearControl.Command.MoveJogPos |
只要命令变量被置位,就在从轴上执行负方向的运动(反向点动) |
GearControl.Command.MoveJogNeg |
在从轴上以预定义的终点位置开始运动(绝对定位) |
GearControl.Command.MoveAbsolute |
在从轴上以预定义的路径开始运动(相对定位) |
GearControl.Command.MoveAdditive |
在从轴上以预定义的速度开始运动(恒速运动) |
GearControl.Command.MoveVelocity |
停止正在进行中的运动(暂停运动) |
GearControl.Command.Halt |
停止正在进行中的运动并防止新的运动开始(停止运动) |
GearControl.Command.Stop |
确认轴的错误 |
GearControl.Command.ErrorAcknowledge |
在开始运动之前,需要对主轴进行准备。要做到这一点,伺服控制器必须被上电,而且必须已经进行了回零。
必须完成以下步骤来设置耦合:
•伺服控制器上电 GearControl.Command.Power.
•当变量 GearControl.Command.Power 收到TRUE值时,应使用 GearControl.Command.Home 将从轴回零 。
现在,驱动器已经准备好与主轴耦合。这是用 GearControl.Command.StartSlave完成的 。
现在,当主轴移动时,从轴也跟着做完全相同的运动。主轴使用 basicsCyclic.st任务进行操作 ,该 任务 在 执行驱动功能 部分有更详细的描述 。
可以用 GearControl.Command.DisengageSlave解除两轴 的耦合关系。
如果发生错误, GearControl.Status 区域将显示一个 ErrorID 和可能的 ErrorText。
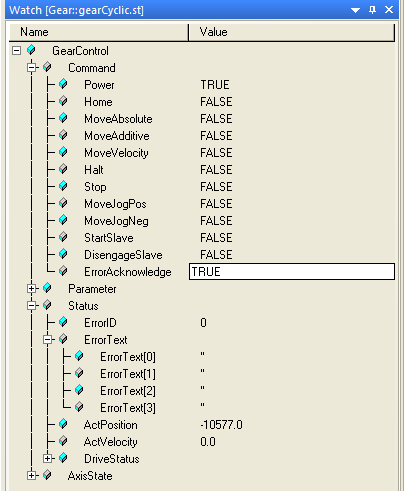
通过将 GearControl.Command.ErrorAcknowledge 变量设置 为TRUE,可以确认一个未确认的错误 。
有关该示例程序的更多信息,请参见 双轴的简单耦合。