如果一个ParID被连接到这个输入端,功能块将其作为相位偏移值(shift)的来源(对于 "应用模式 " mcTIME_BASED、 mcMASTER_POSITION_BASED 和 mcMASTER_DISTANCE_BASED)或作为速度值的来源(对于 "应用模式 " mcVELOCITY_CONTROL)。
如果"Enable"输入被设置为 "TRUE" ,并且从轴处于 同步运动 状态,那么对ParID值的所有改变都会立即生效。
对于"应用模式ApplicationMode " mcTIME_BASED、 mcMASTER_POSITION_BASED 或 mcMASTER_DISTANCE_BASED,该值被解释为与 "ShiftMode = mcABSOLUTE_NO_RESET"相同 。在这三种应用模式下,输入 "Shift"、"PerformVelocityControl "和 "ShiftMode "不被使用!
对于"应用模式ApplicationMode = mcVELOCITY_CONTROL",输入 "Velocity "的值被作为极限值。
输入 "速度"、"加速度 "和 "应用距离"(ApplicationDistance仅适用于 mcMASTER_DISTANCE_BASED)的值 可以通过设置输入 "InitData "来改变。当使用 "ShiftParID "时,它们使用[轴参数单位]作为单位!
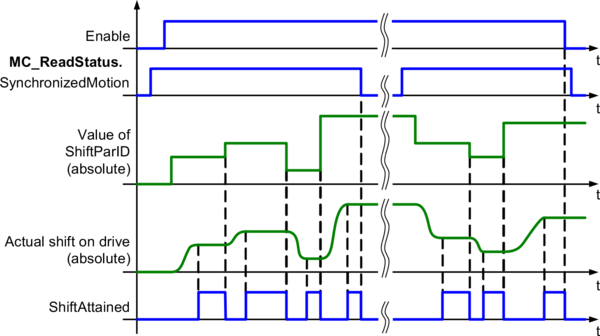
信息: 如果 "ShiftParID "的值发生了变化,并且当从轴处于 同步运动 状态时 ,如果功能块被启用("Enable = TRUE") ,那么将立即执行一次相位偏移动作。 |
例子