<< 点击显示目录 >>
主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 电子齿轮(Gears) > MC_GearIn >
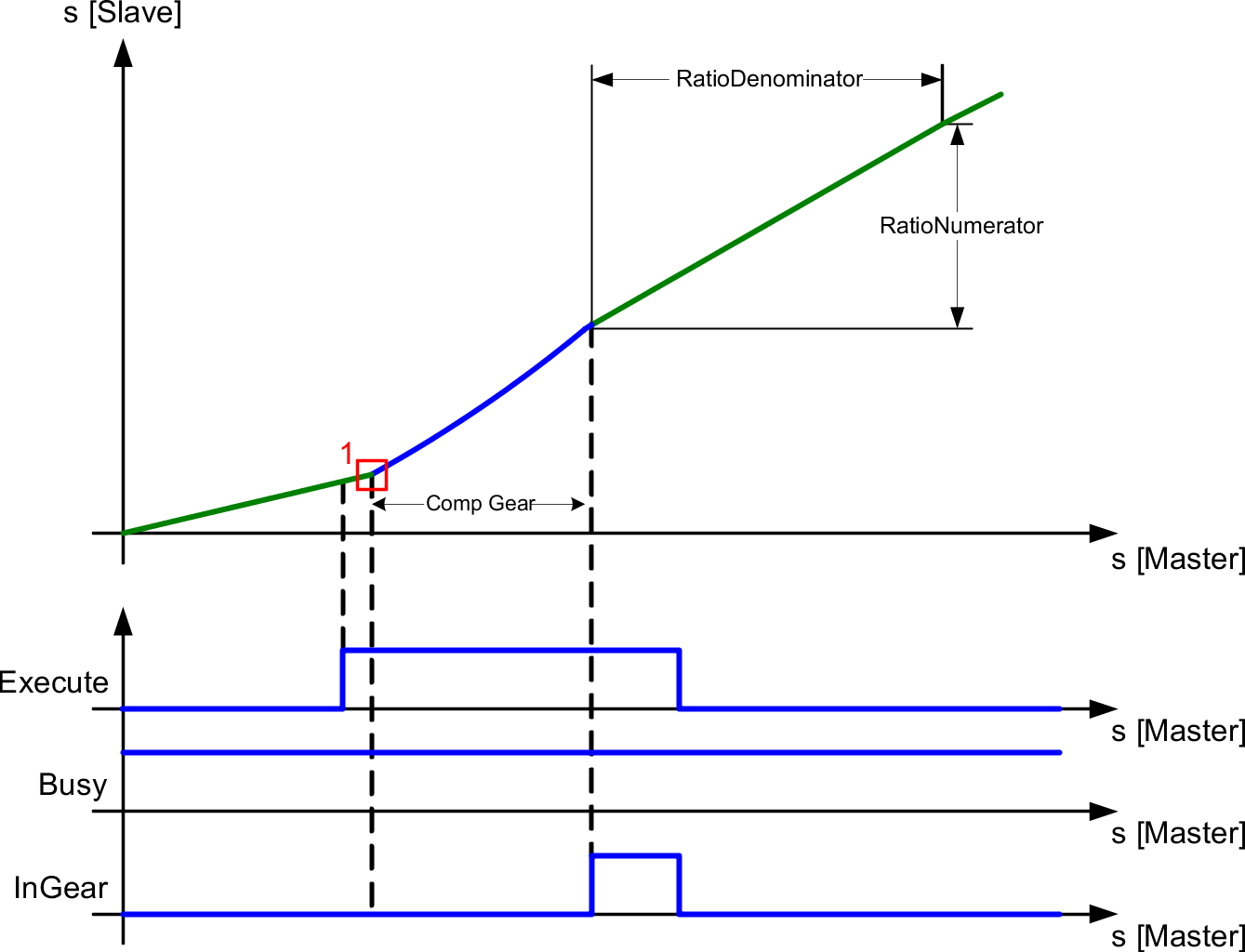
下图显示了当从轴已经通过 MC_GearIn与主轴耦合时,再次调用 "执行 "输入的效果 。从轴驱动器使用为 "加速度 "定义的值来计算补偿齿轮,这样可以确保从旧比率到新比率的平稳过渡。由于补偿齿轮是直接在驱动器上计算的, MC_GearIn 功能块无法获得有关计算出的补偿(补偿齿轮)长度的信息。
该图还显示了 "Busy "和 "InGear "输出之间的关系。
1
参数传输完成