<< 点击显示目录 >>
主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 扭矩控制 > MC_BR_TorqueControl >
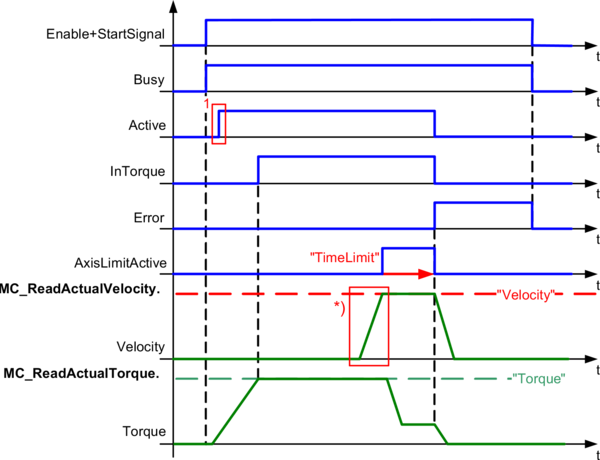
下图说明了输入和输出之间的关系:
*) 由机械部件或产品引起的
1个参数传输完成
速度完全是电机施加的力和以下因素的综合结果,例如:
•反作用力随着恢复而普遍减少
•由于作用力,产品部分或完全跳出了轨道
•产品没有停留在原位(附着力差或根本没有附着)。
•机械部件断裂或松动(尽管这将导致反作用力的损失)