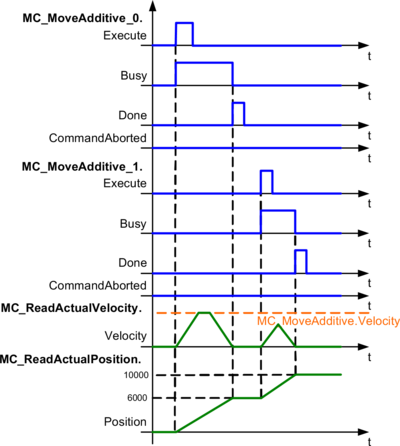
下图说明了 在轴处于 离散运动 状态 时, 将两个 MC_MoveAdditive 功能块MC_MoveAdditive_0(功能块1)和MC_MoveAdditive_1(功能块2) 相结合的两种可能方式 。
•在第一个图中,功能块1在功能块2启动前停止了运动。
•在第二个图中,第二个功能块在第一个功能块完成其运动之前就开始了。"距离 "被加到当前运动的目标位置上,两者之和成为轴的新目标位置。
在这两种情况下,轴都在10000位置终止运动。
|
<< 点击显示目录 >> 主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 基础运动 > MC_MoveAdditive > 时序图 |
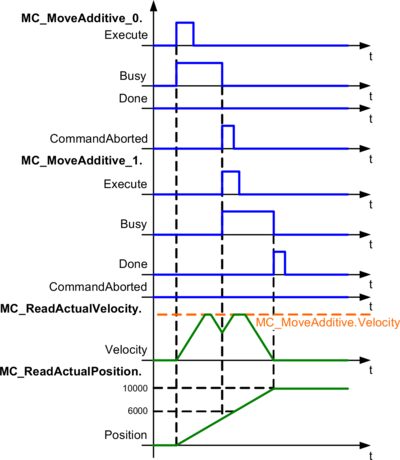
下图说明了 在轴处于 离散运动 状态 时, 将两个 MC_MoveAdditive 功能块MC_MoveAdditive_0(功能块1)和MC_MoveAdditive_1(功能块2) 相结合的两种可能方式 。
•在第一个图中,功能块1在功能块2启动前停止了运动。
•在第二个图中,第二个功能块在第一个功能块完成其运动之前就开始了。"距离 "被加到当前运动的目标位置上,两者之和成为轴的新目标位置。
在这两种情况下,轴都在10000位置终止运动。