在通过输入 "Execute "启用功能块后,通过 "TorqueRamp "将扭矩提升到设定值 "Torque"(蓝色曲线)。如果负载现在被移除或太低,那么电机就会加速到配置的极限 "速度"。
从这一刻起,扭矩会以稳定的方式减少,以防止速度的继续额外增加。
如果一个加速的负载作用在电机上,那么扭矩将上升到MOTOR_TORQ_MAX。该限制的应用方向与应用扭矩的方向相同。在相反的方向上不提供稳定(例如,对于绕线机,是速度决定了后续的生产)。
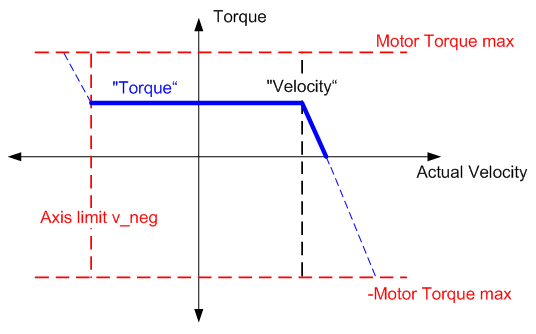
正 "扭矩 "的例子:
配置实例:
"Torque" = 2.0
"TorqueRamp" = 0.5
"Velocity" = 5000.0
"Acceleration" = 0.0
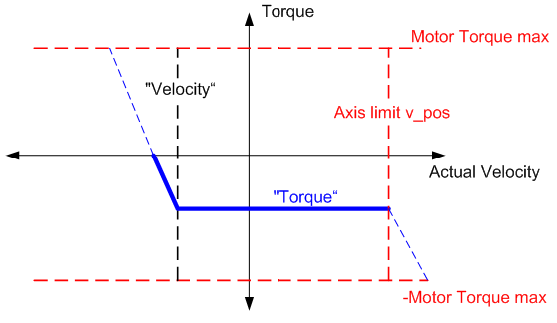
负 "扭矩 "的例子:
配置实例:
"Torque" = -2.0
"TorqueRamp" = 0.5
"Velocity" = -5000.0
"Acceleration" = 0.0
当前的速度 > "Velocity"
这些图显示,在没有负载的情况下,当前速度可以高于配置的最大速度限制 "Velocity"值。
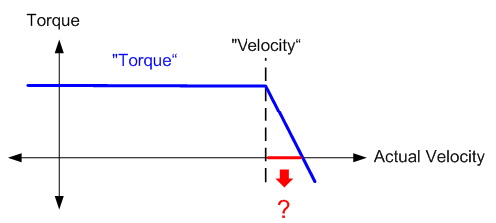
这意味着,在速度极限之前,可以保持实际扭矩为设定扭矩值。如果实际速度超过了配置的速度极限,那么扭矩设定值将被降低。由此产生的最大速度(当当前扭矩≈0时)可以用以下公式计算:

如果一个特定的速度不应该被超过,那么这个公式可以用来计算输入 "Velocity"的相应值,以确保这一点。
输出 "AxisLimitActive "指示轴是否在速度极限,或以上移动(负载不足)。