扭矩设定点 "Torque "可以使用正负值,通过 "TorqueRamp "斜坡达到。
使用要求
•该功能块只能与一个实轴对象一起使用。
•如果该功能块与ACP10SIM轴一起使用,必须设置仿真模式为"完全"。
•在该功能块激活("激活"=TRUE)之前,以及在其被禁用或中止之后,轴的位置/速度环控制器是激活的。为此,必须对可能的负载情况使用保守的控制器参数(NC初始化参数模块)。
允许启用该功能块的PLCopen轴状态
•静止
•离散运动
•连续运动
•同步运动
功能块
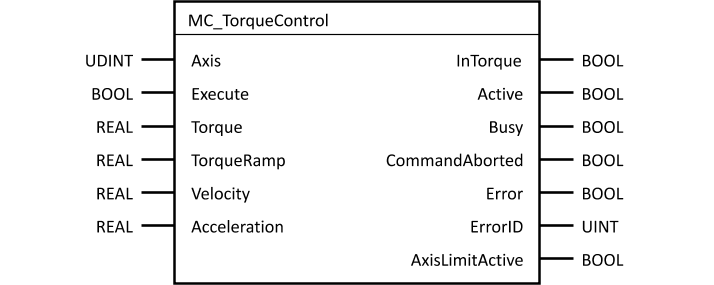
参数
输入/输出 |
参数 |
数据类型 |
描述 |
|
B |
IN |
UDINT |
轴对象引用 |
|
B |
IN |
BOOL |
功能块的执行在该输入的上升沿开始 |
|
B |
IN |
Torque |
REAL |
给轴的有符号的扭矩设定值 [Nm] |
E |
IN |
TorqueRamp |
REAL |
扭矩增量,直到达到"扭矩"值 [Nm/s] 注意: 值 "0 "是一个有效的设置,并切断斜坡的生成。 |
E |
IN |
Velocity |
REAL |
最大速度 [PLCopen units/s] 一旦达到这个值,扭矩就开始稳定下来。 注意: 当负载不足时,这可以作为一个限制保护。 允许值≤0。 它的作用方向与 "扭矩 "相同 → 负值的作用方向与 "扭矩 "相反(见输入 "速度" 的描述)。 |
E |
IN |
Acceleration |
REAL |
最大加速度 [PLCopen units/s²] 当"速度 "值发生变化时,最大减速度 [PLCopen unit/s²] (不一定达到) 注意: 如果在此输入上指定的值是 "0","<0 "或>极限值,则使用来自轴结构(limit.parameter.a1_pos)的轴的极限值。 |
B |
OUT |
InTorque |
BOOL |
达到扭矩设定点 注意: 如果 "AxisLimitActive "输出为 FALSE,则扭矩设定值与实际扭矩值 相对应。 |
E |
OUT |
Active |
BOOL |
功能块激活,可以执行动作 |
E |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用。 |
E |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
B |
OUT |
Error |
BOOL |
执行过程中出错 |
E |
OUT |
ErrorID |
UINT |
|
V |
OUT |
AxisLimitActive |
BOOL |
轴速度限制激活 注意: 当该输出被激活时,电机上的扭矩设定值被自动调整,以使轴回到有效的速度范围内(稳定化)。它不再被调节到配置的 "扭矩"设定值。 |
表:参数 MC_TorqueControl
本节的主题: