"执行 "或 "启用 "输入的上升沿会设置相应的内部参数,并开始以指定的扭矩进行运动。
该功能块在设置驱动器的参数时考虑到编码器的计数方向。
"Active"、"InTorque "和 "AxisLimitActive "输出的信息是在运行过程中从一个状态字中获得的(循环读取,按位计算)。
参数只在 "执行 "或 "启用 "输入的上升沿传输。使用ACOPOS设备中的斜率发生器应用斜率设定值。
这个功能块可以被任何其他运动功能块中止。当这种情况发生时,会试图使过渡尽可能地平稳。初始化、中止和开始一个新的运动是通过其他功能块的参数列表来完成的。
EventMoveXxx功能块是个例外,不能中止TorqueControl功能块。
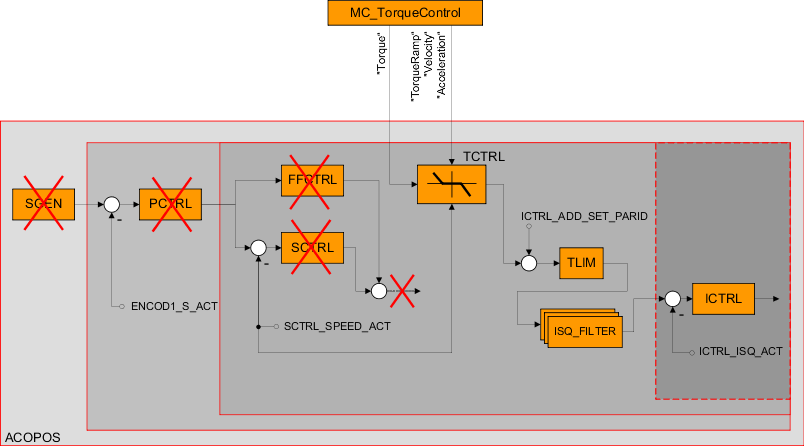
当该功能块被启用时,位置控制器(PCTRL)和速度控制器(SCTRL)被禁用。如果该功能块被中断,当SCTRL和PCTRL被重新启用时,运动将以下列ParID的值进行减速。
•ACP10PAR_PCTRL_ENABLE_A2_POS
•ACP10PAR_PCTRL_ENABLE_A2_NEG
当TorqueControl运动中止时,在用于减速之前,中断功能块的 "减速度 "输入上指定的值被写入该ParID。
与 MC_TorqueControl 或 MC_BR_TorqueControl 一起使用时, 在 "位置 "或 "速度 "输出上显示编码器值,而不是 MC_ReadActualPosition 和 MC_ReadActualVelocity 功能块 的设置点 。
内部数据链接
这个PLCopen功能块的工作原理是,当功能块初始化时,ACOPOS设备内部会有几个变化。TCTRL功能实质上是一个P组件。下图提供了一个干预点的概述: