只要 "启用 "输入为 " true",该功能块就会返回轴的速度。如果 "速度 "输出有效,"有效 "输出为 TRUE。" 错误"输出表示无法读取轴的速度。
信息: •这个功能块在第一次调用后立即返回 "有效"(或 "错误")。 |
信息: •对于 V2.290之前的版本 ,SG3目标系统或CAN总线: "位置 "输出的最小更新时间与NC Manager任务类的周期时间相同。 •对于 V2.290 及以上版本,SG4目标系统和POWERLINK: "位置 "输出的最小更新时间与为处理周期性数据而定义的任务类别的周期时间相同(见 一般信息)。 |
使用要求
•用于SG3/SGC目标系统的功能块名称:MC_001_ReadActualVelocity
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
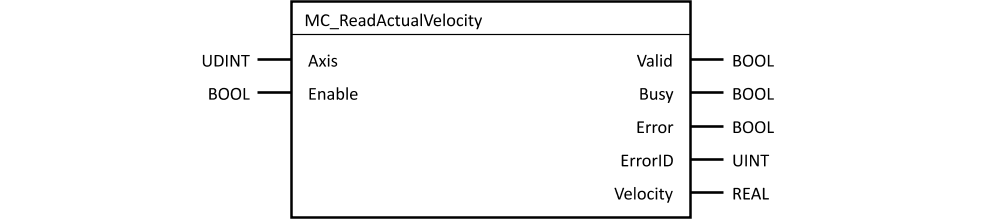
参数
输入/输出 |
参数 |
数据类型 |
描述 |
|
B |
IN |
UDINT |
轴对象引用 |
|
B |
IN |
BOOL |
开启时读取速度 |
|
B |
OUT |
Valid |
BOOL |
可以使用该功能块的输出值 |
E |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用。 |
B |
OUT |
Error |
BOOL |
执行过程中出错 |
E |
OUT |
ErrorID |
UINT |
|
B |
OUT |
Velocity |
REAL |
当前速度值 (使用轴单位 [units/s]) |
本节的主题: