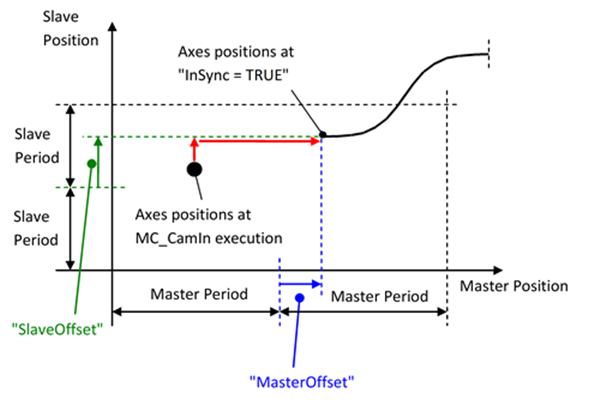
从轴利用其周期的起始点和从轴偏移量(slave offset) 来计算出凸轮cam的起始位置。它使用速度和加速度参数(PLCopen运动参数表 1001-1006)移动到这个位置 。然后它在那里等待(从轴有可能会先到大起始位置),直到主轴也到达主轴偏移量(master offset)位置后,然后从轴再与主轴耦合,"InSync"输出被设置。
当主轴移动时,从轴耦合可以延迟一个或多个主轴周期。这给了从轴到达从轴起始位置所需的时间。(这是有可能的,比如主轴运行速度很快,从轴的速度和加速度都比较小,主轴已经运行了多个周期后从轴才运行至起始位置)