Setting the "ControllerParameters.AutoParamIntegrator" parameter to "mcON" calculates the integral action time and makes it available in "AdditionalInfo.ShiftIntegralTime" or "AdditionalInfo.DistanceIntegralTime".
The following values are applicable in this case:
ProductLength = 3000 units
Velocity = 30,000 units/s
Controller parameters: : ShiftGain = 0.35, ShiftIntegralTime = 0. 4736 (determined automatically), MaxShiftCorrection = 50; controller is enabled at a deviation of approx. -130.
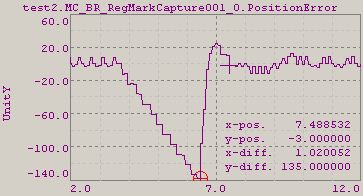
Overshoot is relatively small and the setpoint is reached quickly.