In order to compensate the remaining deviation, an integral component must be enabled in the controller. This is done by setting the ShiftIntegralTime > 0. The smaller this time, the stronger the adjustment of the integral component.
The following values are applicable in this case:
ProductLength = 3000 units
Velocity = 30,000 units/s
Controller parameters: ShiftGain=0.35, ShiftIntegralTime=0.3, MaxShiftCorrection=50; controller is enabled at a deviation of approx. -130.
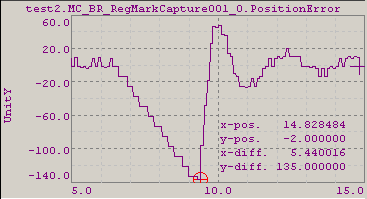
Since the integral adjustment is too strong, i.e. the integral action time is too small, there is a long transient effect and strong overshoots.
Controller parameters: ShiftGain=0.35, ShiftIntegralTime=0.4, MaxShiftCorrection=50; controller is enabled at a deviation of approx. -130.
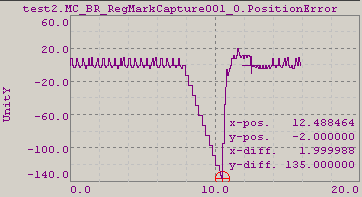
In this case, there is one overshoot before the actual value reaches the setpoint with no remaining deviation.
Controller parameters: ShiftGain=0.35, ShiftIntegralTime=0.6, MaxShiftCorrection=50; controller is enabled at a deviation of approx. -130.
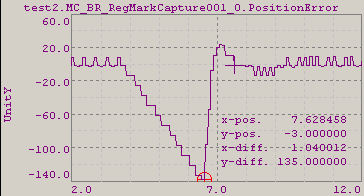
In this case, there is also one overshoot, but then the actual value reaches the setpoint more quickly.
These settings represent a good compromise between the size of the overshoot and the time it takes to reach the setpoint while completely compensating for the deviation.