A P controller alone can quickly compensate for the deviation, but a setpoint deviation remains. The higher the proportional gain ("ShiftGain"), the smaller the remaining deviation, but the larger the setpoint overshoot. Depending on the system being controlled, setting the gain above a certain value results in instability, more or less damped oscillations or sustained oscillation.
The following values are applicable in this case:
ProductLength = 3000 units
Velocity = 30,000 units/s
Controller parameters: ShiftGain=0.9, ShiftIntegralTime=0.0 (integral component disabled); controller is enabled at a deviation of approx. -130.
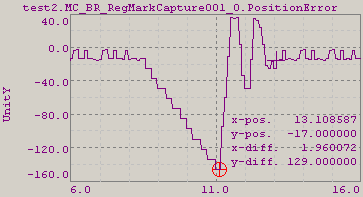
The deviation oscillates above the setpoint twice → ShiftGain is set too high.
Controller parameters: ShiftGain=0.8, ShiftIntegralTime=0.0 (integral component disabled), MaxShiftCorrection=50; controller is enabled at a deviation of approx. -130.
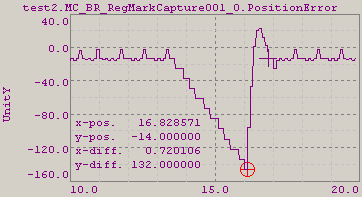
Overshoot approx. 20, remaining deviation approx. -15.
Controller parameters: ShiftGain=0.5, ShiftIntegralTime=0.0 (integral component disabled), MaxShiftCorrection=50; controller is enabled at a deviation of approx. -130.
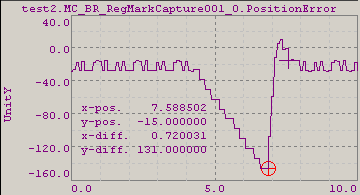
Overshoot approx. 10, remaining deviation approx. -20.
Controller parameters: ShiftGain=0.35, ShiftIntegralTime=0.0 (integral component disabled), MaxShiftCorrection=50; controller is enabled at a deviation of approx. -130.
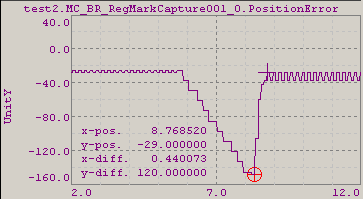
No overshoot, and the setpoint is reached quickly. The remaining deviation is approx. -35.