These parameters define the position and length deviations that should be corrected per product interval. They limit the control actions of the PI controller both for the proportional component and the integral component (anti-windup). Setting them higher allows the controller to compensate for deviations by a greater amount; however, it also allows the controlled variable to overshoot more dramatically.
The following values are applicable in this case:
ProductLength = 3000 units
Velocity = 30,000 units/s
Controller parameters: ShiftGain=0.35, ShiftIntegralTime=0.6, MaxShiftCorrection=1000 (no limitation); controller is enabled at a deviation of approx. -130.
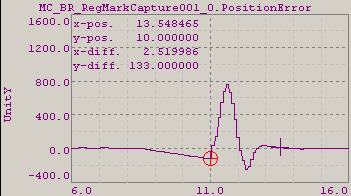
Very large overshoots occur, which would be problematic in a real application.
Controller parameters: ShiftGain = 0.35, ShiftIntegralTime = 0.6, MaxShiftCorrection = 50; controller is enabled at a deviation of approx. -130.
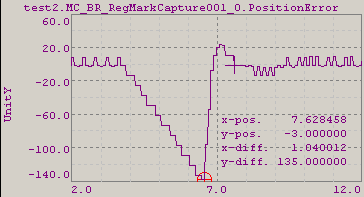
Hardly any overshoots occur here, and the setpoint is reached more quickly.