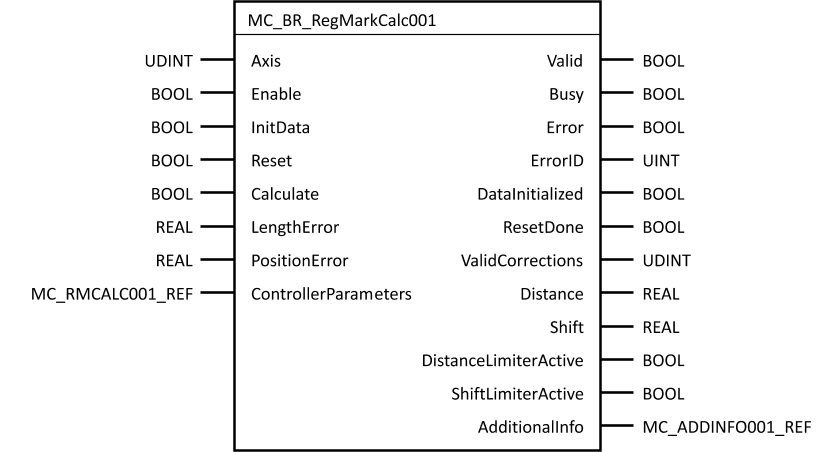
This function block assesses the measured registration mark deviation (MC_BR_RegMarkCaptureXXX, MC_BR_TouchProbe) and returns adjustment values that should be incorporated into the system. As long as the "Enable" input is TRUE, new control errors ("LengthError", "PositionError") can be detected and the corresponding manipulated variables ("Shift", "Distance") calculated.
The controller parameters can be set using the "ControllerParameters" input.
Requirements for use
•This function block can only be used on SG4 target system.
PLCopen axis states in which the function block is permitted to be enabled
All PLCopen axis states, no effect on the PLCopen axis state
Function block
Parameter
I/O |
Parameter |
Data type |
Description |
IN |
UDINT |
Axis reference |
|
IN |
BOOL |
Enables calculation |
|
IN |
InitData |
BOOL |
Reapplies "ControllerParameters" when the function block is enabled Note: The mode from MC_RMCALC001_REF is not applied! |
IN |
Reset |
BOOL |
Deletes internal values (queues, integrators) and restarts the calculation |
IN |
Calculate |
BOOL |
Calculates corrections on each rising edge |
IN |
LengthError |
REAL |
Deviation between the length setpoint and the measured length [units] |
IN |
PositionError |
REAL |
Deviation between the expected position and the measured position |
IN |
ControllerParameters |
MC_RMCALC001_REF |
Parameters for registration mark control |
OUT |
Valid |
BOOL |
Valid values calculated, for one task class cycle = TRUE (as the trigger for correction movement) |
OUT |
Busy |
BOOL |
The function block is active and must continue to be called. |
OUT |
Error |
BOOL |
Error during execution |
OUT |
ErrorID |
UINT |
|
OUT |
DataInitialized |
BOOL |
Input data was initialized |
OUT |
ResetDone |
BOOL |
Internal values deleted (queues, integrators), calculation restarted |
OUT |
ValidCorrections |
UDINT |
Number of valid correction values |
OUT |
Distance |
REAL |
Length deviation [units] |
OUT |
Shift |
REAL |
Position deviation [units] |
OUT |
DistanceLimiterActive |
BOOL |
Distance limiting enabled |
OUT |
ShiftLimiterActive |
BOOL |
Limits for position difference enabled |
OUT |
AdditionalInfo |
MC_ADDINFO001_REF |
Interesting topics in the controller, calculated controller parameters, etc. |
Table: Parameter MC_BR_RegMarkCalc001
MC_RMCALC001_REF data type
Parameter |
Data type |
Description |
Mode |
UINT |
|
MaxDistanceCorrection |
REAL |
Maximum distance correction |
MaxShiftCorrection |
REAL |
Maximum shift correction |
DistanceCorrectionClamp |
BOOL |
mcOFF ... Limits the distance to MaxDistanceCorrection. mcON ... If Distance > MaxDistanceCorrection, "0" is output as the distance. |
AutoParamIntegrator |
BOOL |
mcOFF ... Uses the integral action times from the parameters. mcON ... Automatically calculates the integral action times. |
DistanceGain |
REAL |
Gain factor for distance control |
DistanceIntegralTime |
REAL |
Integral action time for distance control [s] |
ShiftGain |
REAL |
Gain factor for shift control |
ShiftIntegralTime |
REAL |
Integral action time for position control [s] |
ValuesForAveraging |
USINT |
Number of values to be averaged (1…50) |
ValuesForQueuing |
USINT |
Number of values to be queued (1…50) |
MC_ADDINFO001_REF data type
Parameter |
Data type |
Description |
LengthErrorFiltered |
REAL |
Length error after queue (mcQUEUED) or average calculation (mcAVERAGE, mcAVERAGE_WEIGHTED) Note: Not used with mcIMMEDIATE. |
DistancePAction |
REAL |
Proportional action of distance controller |
DistanceIAction |
REAL |
Integrator action of distance controller |
DistanceIntegralTime |
REAL |
Integral action time of distance controller [s] |
PositionErrorFiltered |
REAL |
Position error after queue (mcQUEUED) or average calculation (mcAVERAGE, mcAVERAGE_WEIGHTED) Note: Not used with mcIMMEDIATE. |
ShiftPAction |
REAL |
Proportional action of shift controller |
ShiftIAction |
REAL |
Integrator action of shift controller |
ShiftIntegralTime |
REAL |
Integral action time of position controller [s] |
TimeBetweenRMs |
REAL |
Measured time between the last two registration marks [s] Note: This value is limited to max. 60 s. |
Topics in this section: