根据共振频率或反共振频率的位置(与相位交越频率有关),这些特征量有不同的影响。
共振频率和反共振频率高于相位交越频率
共振在这种情况下是一个问题,因为它对可实现的增益有限制作用。原因是振幅响应中的1.0(0dB)值与-180°相移。在这种情况下,反共振是不重要的,因为它所阻挡的频率不会明显地降低控制行为。与反共振频率不同,共振频率会在带宽之外造成问题。
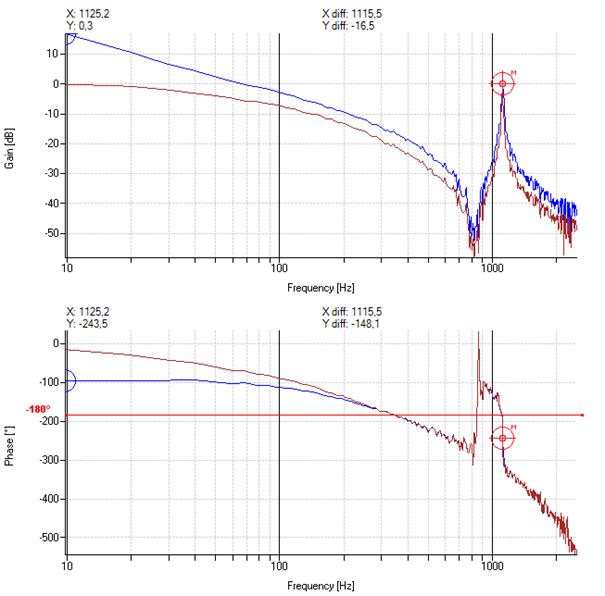
图: 相位交越频率以上的共振频率和反共振频率:受控系统(蓝色)和闭环(棕色)。
共振频率和反共振频率低于相位交越频率
在这种情况下(图: 相位交越频率以下的共振频率和反共振频率:受控系统(蓝色)和闭环(棕色)),反共振是有问题的,原因有二:
•在闭环中,反共振频率范围内的频率成分被阻断,这降低了对设定值变化的响应(同样适用于干扰响应)。
•闭环控制回路显示了一个大约-90°的相移,正好在反共振频率之下。这对主位置控制回路的影响是,只能配置低增益值。原因是实际速度和实际位置之间有一个额外的-90°的相移。 (见图: 受控系统(蓝色)和位置控制器的闭环(棕色)。就在反共振频率下面是受控系统的相移,接近-180°。).
共振在这种情况下没有意义,因为在闭环时,相移约为-90°的高振幅响应值是不关键的。
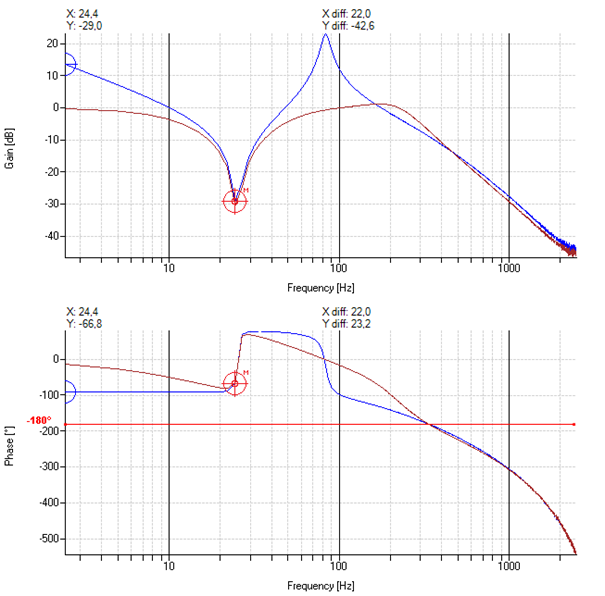
图: 共振频率和相位交越频率以下的反共振频率:受控系统(蓝色)和闭环(棕色)。
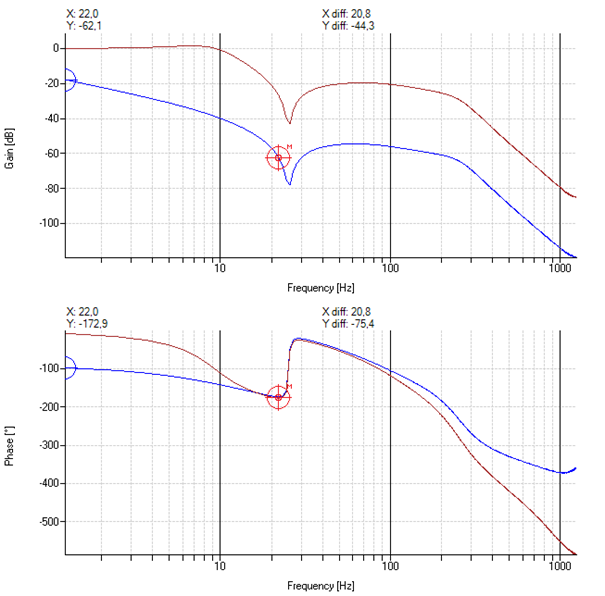
图: 受控系统(蓝色)和位置控制器的闭环(棕色)。就在反共振频率的下方是受控系统的相移,接近-180°。