•死区时间
•共振、反共振
•编码器分辨率
•位置测量原理
死区时间 Dead time
这使得我们可以从相位响应中推断出现有的死区时间。下面的例子显示了一个由带有死区时间的积分器组成的控制系统的情况:
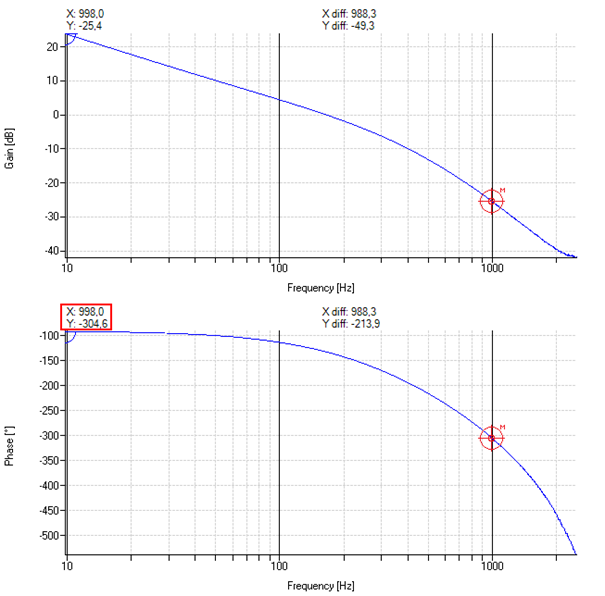
图: 有死区时间的控制系统的波德图
以下内容适用于测量光标:
这允许计算TDead ,同时考虑到独立于死区时间的-90°相移:
共振,反共振
共振频率(幅频响应中的正峰值)和反共振频率(幅频响应中的负峰值)可以用测量光标读取。
共振
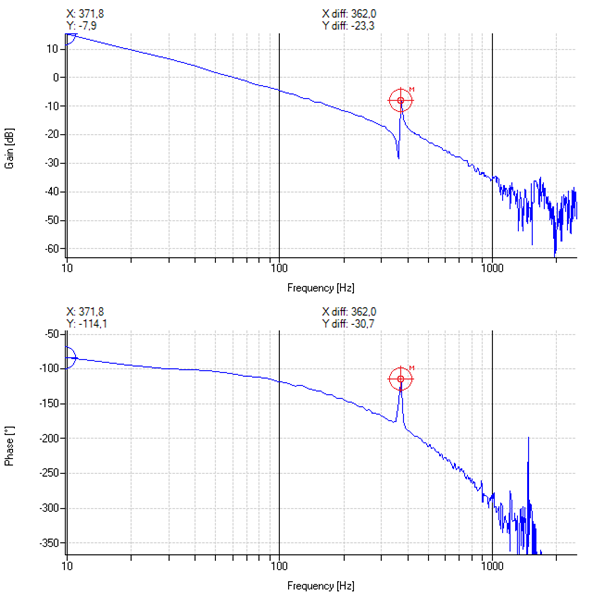
图: 用于计算共振频率的波德图
在371.8Hz处可识别出一个共振。
反共振
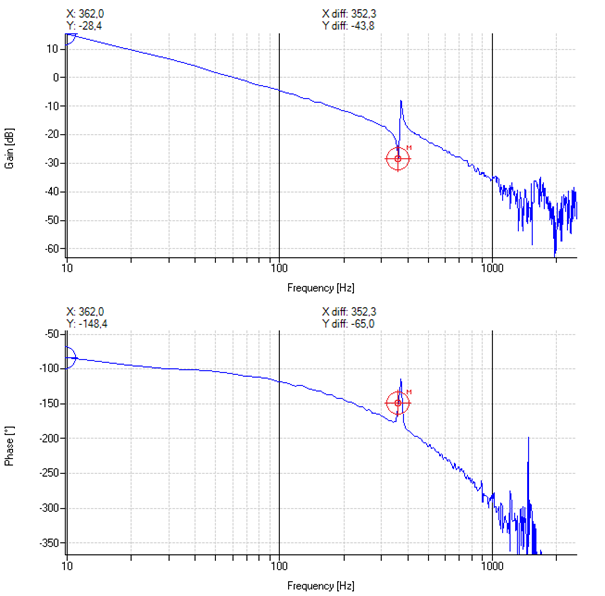
图: 计算反共振频率的波德图
在362.0赫兹可识别出反共振。
编码器分辨率
高分辨率 (例如:EnDat编码器)
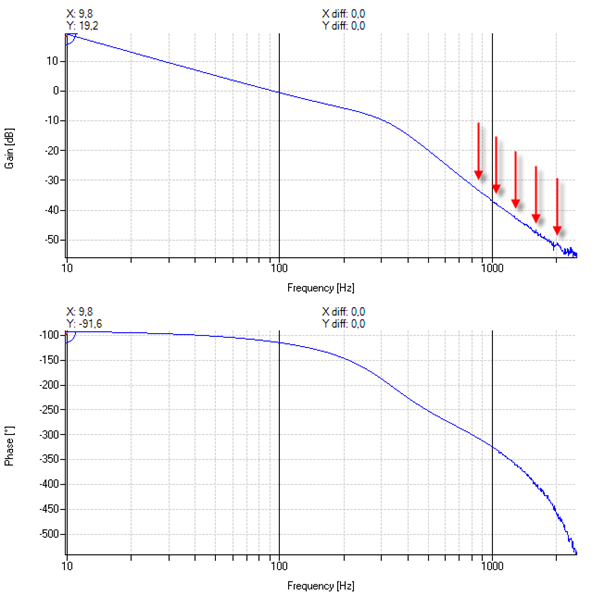
图: 高分辨率编码器的波德图
一直到高频>1000Hz,振幅响应很容易识别。
低分辨率 (例如:旋变编码器)
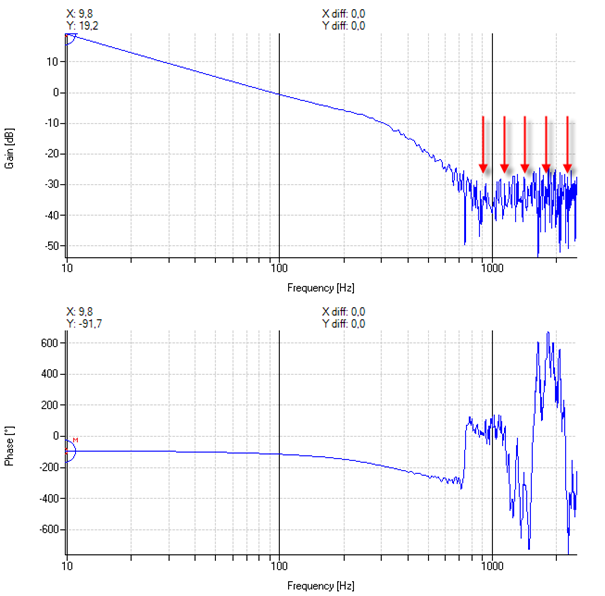
图: 低分辨率的编码器的波德图
较低的编码器分辨率可以通过在较高频率下说明振幅响应上限的噪声来识别。
编码器原理
如果使用与传统编码器不同的原理来确定位置(如无编码器控制(ELC)的观测器,霍尔传感器),这可以从波德图中识别出来。
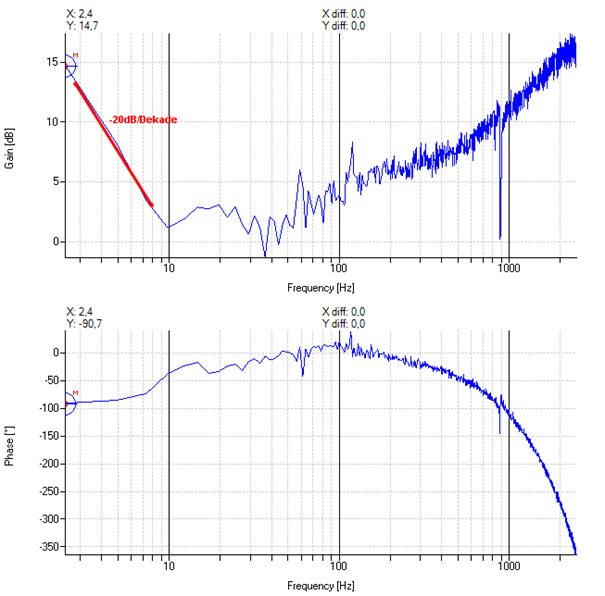
图: ELC轴的波德图
驱动系统的典型下降幅度为20dB/decade,只存在于低频。对于更高的频率,振幅响应的行为是增加。