该功能块读取存储在数据对象中的凸轮cam的多项式数据,并使用它来计算一个节点矢量。此外,它还计算可以通过数据类型MC_CALC_CAM_CONFIG_REF的结构输出的信息。
在这种形式和附加信息下,很容易修改数据,然后用 MC_BR_CalcCamFromPoints 功能块将其转换回多项式数据 。
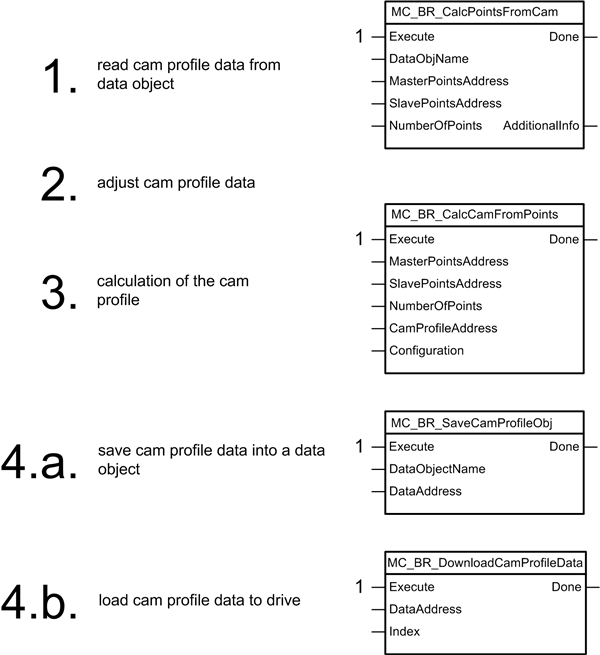
一个可能的应用配置的例子
信息: 如果一个凸轮cam被重新从节点计算出来,那么结果可能与原始凸轮有很大的偏差!这些偏差取决于计算的节点数量以及原始凸轮的形式。 |
先决条件和要求
•第一个节点的位置必须是 "0.0"。
•"NumberOfPoints "不允许小于3,因为 使用了插值模式 mcubic_SPLINE 。
•最后一个主轴位置必须是一个整数。
•主轴的位置必须是严格的单调递增。
•等距主轴位置不必在 "MasterPointsAddress "输入中指定,它们可以由功能块使用存储在数据对象中的主周期信息自动确定。这个信息被输出到 "AdditionalInfo.MasterPeriod "参数中。
•不允许指定大于指定凸轮 "MasterPeriod "主周期的主位置。