该功能块将两个节点向量(主从轴位置坐标)转换为一个多项式凸轮。
使用要求
•这个功能块只能在SG4目标系统上使用。
•该功能块执行大量的计算,在某些目标系统上的快速任务类中可能会导致周期时间被超过!
允许启用该功能块的PLCopen轴状态
•所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
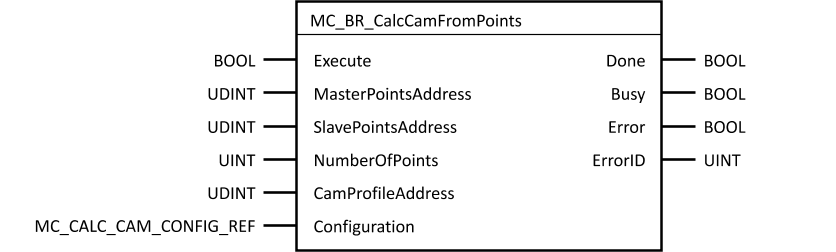
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
BOOL |
功能块的执行在该输入的上升沿开始。 |
|
IN |
MasterPointsAddress |
UDINT |
带有主轴位置的节点向量的地址,REAL阵列 注意: 如果不指定,将使用 "Configuration.MasterPeriod "参数,根据从轴位置自动计算等距的主站位置。 |
IN |
SlavePointsAddress |
UDINT |
带有从轴位置的节点向量的地址,REAL阵列 |
IN |
NumberOfPoints |
UINT |
节点的数量 |
IN |
CamProfileAddress |
UDINT |
用于计算凸轮轮廓数据的变量地址,MC_CAMPROFILE_TYP数据类型 |
IN |
Configuration |
MC_CALC_CAM_CONFIG_REF |
用于插值的可选附加配置 注意: 如果没有提供设定值,那么将使用默认设置(见MC_CALC_CAM_CONFIG_REF数据类型) |
OUT |
Done |
BOOL |
执行成功。功能块已经完成。 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续被调用。 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
表: 参数 MC_BR_CalcCamFromPoints
MC_CAMPROFILE_TYP 数据类型
参数 |
数据类型 |
描述 |
MasterPeriod |
DINT |
主轴周期的长度 |
SlavePeriod |
DINT |
从轴周期的长度 |
PolynomialNumber |
UDINT |
计算的多项式的最大数量:1..128 ( V5.030之前 ) 多项式的数量:1..64 |
PolynomialData |
MC_POLYNOMIAL_DATA[128] (在 V5.030之前 ) MC_POLYNOMIAL_DATA[64] |
多项式系数 |
MC_POLYNOMIAL_DATA 数据类型
参数 |
数据类型 |
描述 |
A |
REAL |
多项式系数 |
B |
REAL |
多项式系数 |
C |
REAL |
多项式系数 |
D |
REAL |
多项式系数 |
E |
REAL |
多项式系数 |
F |
REAL |
多项式系数 |
G |
REAL |
多项式系数 |
X |
REAL |
最大主控位置 |
Reserved |
UDINT |
= 0 (Reserve) |
MC_CALC_CAM_CONFIG_REF 数据类型
参数 |
数据类型 |
描述 |
Mode |
UINT |
插值模式: 三次样条插值(3阶多项式)。在靠近边缘的区域,使用5阶多项式来定义斜率和曲率。 具有优化速度特性的5阶多项式 具有优化的速度和加速度特性的5阶多项式 用5阶多项式进行最佳拟合插值。 用6阶多项式进行最佳拟合插值 如果没有指定(0),则 使用mcCUBIC_SPLINE 。 |
CamType |
BOOL |
周期性或非周期性操作 使用 "StartSlope"、"EndSlope "和 "StartCurvature"、"EndCurvature "参数来确定多项式凸轮开始和结束时的斜率以及曲率。 起始点和终点的斜率和曲率的设置与对方相同。 如果没有指定(0),则 使用mcNON_PERIODIC 。 |
NumberOfPolynomials |
USINT |
计算的多项式的最大数量:1 .. 128 ( V5.030之前 ) 计算的多项式的最大数量:1 .. 64 如果不指定(0),那么所需多项式的数量将自动确定。 |
MasterPeriod |
DINT |
主周期的长度 只有在 "MasterPointsAddress "输入中没有指定主位置的向量时才需要指定。 |
StartSlope |
REAL |
曲线开始时的斜率(速度) |
StartCurvature |
REAL |
曲线开始时的曲率(加速度) |
EndSlope |
REAL |
曲线末端的斜率(速度) |
EndCurvature |
REAL |
曲线末端的曲率(加速度) |
本节的主题: