This function block is used to perform the following actions:
•Starting the procedure of setting up phasing
•Saving collected parameters in an ACOPOS parameter table
•Aborting a setup procedure in progress
No other function blocks should be enabled for this axis while this function block is enabled. Doing so may have a negative effect on the results.
Requirements for use
•Function block name for SG3/SGC target systems MC_064BR_SetupMotorPhasing
•If this function block is used with an ACP10SIM axis, simulation mode "Complete" must be set.
PLCopen axis states in which the function block is permitted to be enabled
"Command" |
PLCopen axis states in which the function block is permitted to be enabled |
All PLCopen axis states, no effect on the PLCopen axis state |
|
All PLCopen axis states, no effect on the PLCopen axis state |
Function block
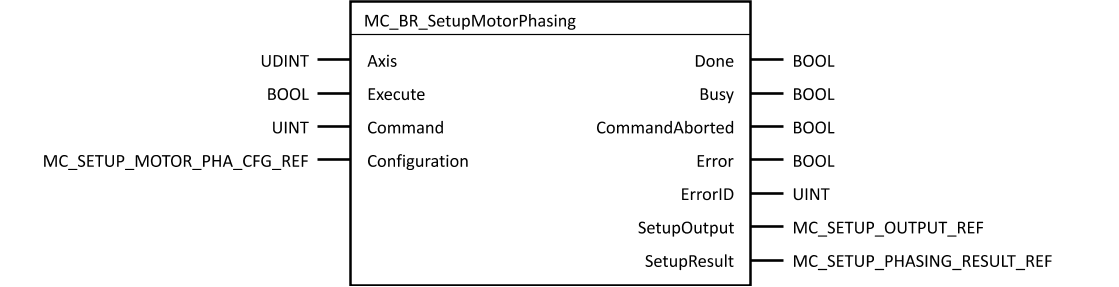
Parameter
I/O |
Parameter |
Data type |
Description |
IN |
UDINT |
Axis reference |
|
IN |
BOOL |
Execution of the function block begins on a rising edge of this input. |
|
IN |
Command |
UINT |
Selects the command |
IN |
Configuration |
MC_SETUP_MOTOR_PHA_CFG_REF |
Input parameters required for operation |
OUT |
Done |
BOOL |
Command executed |
OUT |
Busy |
BOOL |
The function block is active and must continue to be called. |
OUT |
CommandAborted |
BOOL |
Function block aborted by another function block |
OUT |
Error |
BOOL |
Error during execution |
OUT |
ErrorID |
UINT |
|
OUT |
SetupOutput |
MC_SETUP_OUTPUT_REF |
Output structure |
OUT |
SetupResult |
MC_SETUP_PHASING_RESULT_REF |
Result structure |
Table: Parameter MC_BR_SetupMotorPhasing
MC_SETUP_MOTOR_PHA_CFG_REF data type
Parameter |
Data type |
Description |
DatObj |
MC_DATOBJ_REF |
Parameter for storing the setup data |
SetupMotorPhasingPar |
MC_SETUP_MOTOR_PHA_PAR_REF |
Parameter for the setup configuration |
MC_DATOBJ_REF data type
Parameter |
Data type |
Description |
Name |
STRING[32] |
Name of the data object Note: BR data object names are limited to eight characters. |
Type |
UINT |
mcDATOBJ ... A BR data object is created. |
Format |
UINT |
Must be set to 0 |
Device |
STRING[32] |
Not used with this function block |
MC_SETUP_MOTOR_PHA_PAR_REF data type
Parameter |
Data type |
Description |
Mode |
UINT |
Mode mcSATURATION (seeACOPOS drive functions - Motor phasing - Saturation) mcSTEPPER(see ACOPOS drive functions - Motor phasing - Stepper) mcDITHER (see ACOPOS drive functions - Motor phasing - Dither) mcSET_OFFSET (see ACOPOS drive functions - Motor phasing - Direct 1) |
Current |
REAL |
Motor current during phasing [A] Note: If "0" is specified for this input, the default value is used for the setup procedure. The default value depends on "Mode". mcSATURATION:1.5*√2*MOTOR_CURR_RATED mcSTEPPER: √2*MIN(ACOPOS_CURR_RATED,0.8*MOTOR_CURR_RATED) mcDITHER: 0.1*√2*MOTOR_CURR_RATED Range of values: [0,√2*MAX(MOTOR_CURR_PEAK,0.8*ACOPOS_CURR_PEAK)] |
Time |
REAL |
Time for phasing the motor [s] This parameter is only needed for mode mcDITHER. Note: If "0" is specified for this input, the default value (0.02) is used for the setup procedure. Range of values: [0.02, 0.1] |
MC_SETUP_OUTPUT_REF data type
Parameter |
Data type |
Description |
Quality |
REAL |
Quality of parameter identification [%] (currently not written to) 0 – 50% … Unusable 50 – 70% … Usable 70 – 90% … Good 90 – 100% … Very good |
DataObjectIdent |
UDINT |
ID of the stored data object |
MC_SETUP_PHASING_RESULT_REF data type
Parameter |
Data type |
Description |
PolePairs |
USINT |
Number of pole pairs |
CommutationOffset |
REAL |
Commutation offset [rad] |
Topics in this section: