在这个功能块回零模式中,轴结构体成员move.homing.parameter中的元素 "mode "和 "ref_pulse "被永久地写入以下数值。轴结构体成员move.homing.parameter中的所有其他元素可以根据以下例子进行选择。
mode = ncSWITCH_GATE
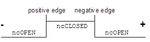
ref_pulse = ncOFF
|
|
定义:
如果寻参开关的逻辑状态 在正方向上从 ncOPEN 变为 ncCLOSED,则开关边缘为正 。
|
|
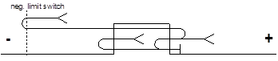
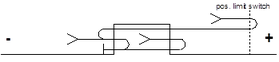
在这种回零模式中,首先用 v_switch 设定的速度开始运动以寻找参考点开关。到达参考点开关后,轴通过 v_trigger 设定的速度移动到配置的开关边缘 。
start_dir = ncNEGATIVE(寻参启动方向为负向)
edge_sw = ncNEGATIVE(找负边缘)
trigg_dir = ncNEGATIVE(trigger方向为负向)
fix_dir = ncOFF
|

|
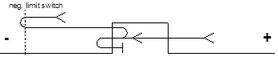
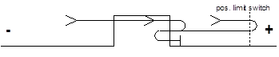
start_dir = ncNEGATIVE(寻参启动方向为负向)
edge_sw = ncPOSITIVE(找正边缘)
trigg_dir = ncNEGATIVE(trigger方向为负向
fix_dir = ncOFF
|

|
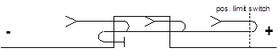
start_dir = ncNEGATIVE(寻参启动方向为负向)
edge_sw = ncNEGATIVE(找负边缘)
trigg_dir = ncPOSITIVE(trigger方向为正向)
fix_dir = ncOFF
|
|
start_dir = ncNEGATIVE(寻参启动方向为负向)
edge_sw = ncPOSITIVE(找正边缘)
trigg_dir = ncPOSITIVE(trigger方向为正向)
fix_dir = ncOFF
|
|
start_dir = ncPOSITIVE(寻参启动方向为正向)
edge_sw = ncNEGATIVE(找负边缘)
trigg_dir = ncNEGATIVE(trigger方向为负向
fix_dir = ncOFF
|
|
start_dir = ncPOSITIVE(寻参启动方向为正向)
edge_sw = ncPOSITIVE(找正边缘)
trigg_dir = ncNEGATIVE(trigger方向为负向
fix_dir = ncOFF
|
|
start_dir = ncPOSITIVE(寻参启动方向为正向)
edge_sw = ncNEGATIVE(找负边缘)
trigg_dir = ncPOSITIVE(trigger方向为正向)
fix_dir = ncOFF
|
|
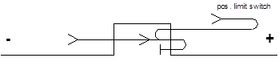
start_dir = ncPOSITIVE(寻参启动方向为正向)
edge_sw = ncPOSITIVE(找正边缘)
trigg_dir = ncPOSITIVE(trigger方向为正向)
fix_dir = ncOFF
|
|
信息:
当使用 fix_dir = ncON时, start_dir 和 tigg_dir 这两个方向必须被设置为相同的值。如果达到极限开关,寻参动作流程将被中止,并发出错误信息。
|
start_dir = ncNEGATIVE(寻参启动方向为负向)
edge_sw = ncPOSITIVE(找正边缘)
trigg_dir = ncNEGATIVE(trigger方向为正向)
fix_dir = ncON
|

|
start_dir = ncNEGATIVE(寻参启动方向为负向)
edge_sw = ncNEGATIVE(找负边缘)
trigg_dir = ncNEGATIVE(trigger方向为正向)
fix_dir = ncON
|

|
start_dir = ncPOSITIVE(寻参启动方向为正向)
edge_sw = ncPOSITIVE(找正边缘)
trigg_dir = ncPOSITIVE(trigger方向为正向)
fix_dir = ncON
|

|
start_dir = ncPOSITIVE(寻参启动方向为正向)
edge_sw = ncNEGATIVE(找负边缘)
trigg_dir = ncPOSITIVE(trigger方向为正向)
fix_dir = ncON
|

|