<< 点击显示目录 >>
主页 轴控开发使用手册 > ACP10/ARNC0帮助信息 > ACP10_MC运动库 > 分类的功能块 > 凸轮曲线自动序列(Cam Profile Automat) > MC_BR_CheckAutCompensation >
根据指定的补偿参数计算出的automat state 的补偿运动 被检查是否符合限制。
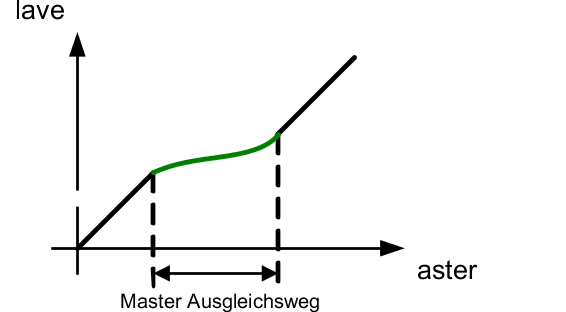
计算主轴在补偿阶段必须移动的最小距离以符合限制。
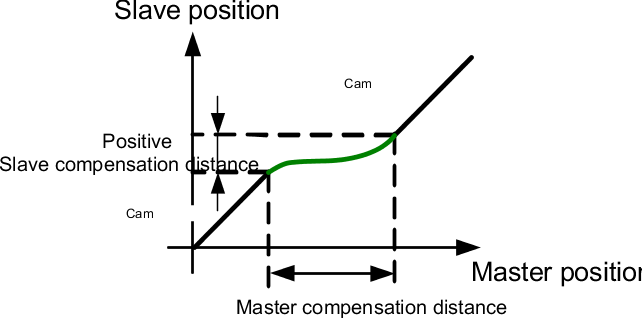
计算在补偿阶段,从轴在正方向上可以移动的最大距离而不违反限制。
计算在补偿阶段,从轴在负方向上可以移动的最大距离而不违反限制。