”方向“输入定义了一个周期轴要到达目标位置的方向和定位模式。
|
只在正方向上运动 |
|
|
只在负方向上运动 |
|
|
在主动运动的方向上的运动 |
|
|
以正方向或负方向移动到目标位置的最短距离。如果两个方向的距离相同,轴将向正方向移动。 |
|
|
终点位置可以位于轴周期之外。如果终点位置也是负数,则轴周期可以在负数方向退出。 |
|
|
除了参数"方向"外,还指定移动到凸轮自动装置的重新启动位置。驱动器上可用的高分辨率位置的小数位被添加到凸轮自动装置的指定目标位置。 如果凸轮自动装置仍然在后台活动(例如,由MC_BR_AutCommand.StandBy = TRUE指示),这就很有用。 如果在凸轮自动装置在后台不再活动时执行,那么驱动器上可用的高分辨率位置的最后一位小数也被添加到凸轮自动装置的指定目标位置。 如果当前位置和目标位置之间的差异小于automat定位公差(PLCopen运动参数表1009),将忽略指定的方向,通过最短的距离接近目标。(对虚拟轴不可用) |
信息: 在静止状态下调用"方向"= mcPOSITIVE_DIR的功能块,并将当前位置作为目标位置,会导致进入下一周期的运动。 原因 ACOPOS驱动器上的位置在内部通过一个额外的小数点的分配被提高。 尽管在目标位置的基础运动结束时,这个小数点的分配正好是零;但是,在一般情况下,在打开控制器、中止运动、回零程序等之后,小数点的分配是存在的。 如果这个动作应该避免大约一个周期,可以有以下选择: •将目标位置增加1。 •如果允许在不正确的方向上有多达1unit单位的移动,则改用 mcSHORTEST_WAY 一次。 |
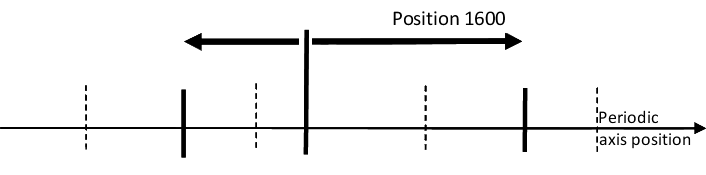
例子 - mcEXCEED_PERIOD:
从当前位置300开始,用-400的目标位置来移动到前一周期的位置600。用1600的目标位置来移动到下一个周期的位置600:
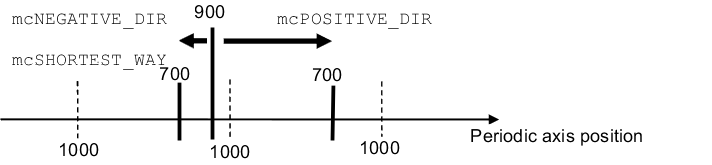
例子:
a) 位置周期为1000的轴将从当前位置900移动到目标700:
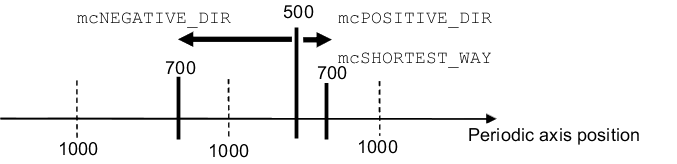
b) 位置周期为1000的轴将从当前位置500移动到目标700:
信息: 在 V1.210 和更高版本中,绝对运动也可以在一个连续轴上的主动运动中开始。 |