该功能块读取存储在凸轮的数据对象中的多项式数据,并通过该数据来计算一个数据类型为MC_CAM_SECTIONS_TYP的结构来输出信息。
在这种形式下(MC_CAM_SECTIONS_TYP),就很容易修改数据,然后使用 MC_BR_CalcCamFromSections 功能块将其转换回多项式数据。
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_080BR_CalcSectionsFromCam
•该功能块执行大量的计算,在某些目标系统的快速任务类中,可能会导致周期时间被超过!
允许启用该功能块的PLCopen轴状态
•所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
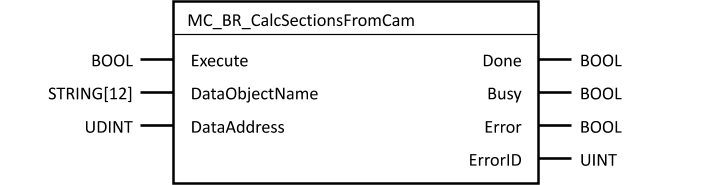
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
BOOL |
功能块的执行在该输入的上升沿开始。 |
|
IN |
DataObjectName |
STRING[12] |
数据对象cam的名称 |
IN |
DataAddress |
UDINT |
具有输出数据的变量的地址,MC_CAM_SECTIONS_TYP数据类型 |
OUT |
Done |
BOOL |
执行成功。功能块已经完成。 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
表: 参数 MC_BR_CalcSectionsFromCam
MC_CAM_SECTIONS_TYP 数据类型
参数 |
数据类型 |
描述 |
Section节段 |
MC_CAM_SECTIONS_TYP[129] (在 V5.030之前 ) MC_CAM_SECTION_TYP[65] |
一个点的数据和随后的部分 |
MC_CAM_SECTION_TYP 数据类型
参数 |
数据类型 |
描述 |
MasterPosition |
REAL |
主轴侧 节段的起始位置 |
SlavePosition |
REAL |
从轴侧 节段的起始位置 |
FirstDerivative |
REAL |
节段起始点的速度 |
SecondDerivative |
REAL |
节段起始点的加速度 |
Mode |
USINT |
指定主轴和从轴的绝对位置或相对于前一个点的位置
注意: 总是用 mcABSOLUTE分配 |
Type |
UINT |
运动规则
注意: 除最后一点和直线外,总是用 mc5TH_ORDER_POLYNOMIAL5阶多项式来分配。 在最后一点, 使用 mcLAST_POINT ;在直线上, 使用mcSTRAIGHT_LINE 。 |
InflectionPoint |
REAL |
拐点的主轴位置 注意: 总是初始化为 "0.0" |
本节的主题: