这个功能块类似于轴上的开关。它可以像安装在轴上的机械凸轮开关一样,切换输出(轨迹)。
使用要求
•用于SG3/SGC目标系统的功能块名称:MC_074BR_DigitalCamSwitch
•该功能块只能在以下插件模块上直接用于数字输出或数字输入:
•ACOPOS: 8AC130.xx-x 和 8AC131.xx-x
•ACOPOSmulti: 8BAC0130.00x-x
•ACOPOS P3: 8EAC013x.000-1
•(在V5.030之前) 该功能块与ACOPOS P3不兼容。
•在本文档中,使用术语 "AC130 "不仅指8AC13x.xx-x ACOPOS插件模块,而且还包括ACOPOSmulti设备的8BAC0130.00x-1插件模块。
•如果该功能块与ACP10SIM轴一起使用,不能使用 "OutputOptions.Slot "和 "OutputOptions.Channel"。
•当该功能块处于活动状态时,不允许对指定的轴进行原点复位。
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态没有影响
信息:
在ACOPOSmulti设备上使用该功能块时,以下几点很重要: ▪8BAC0130.000-x:当使用未连接的通道2和4或通道7和8的数字量输入时,功能块不报错,但通道也不被读取。 ▪8BAC0130.001-x:当使用未连接的通道2和4时,功能块不报告错误,但通道也不被读取。 ▪一个8BAC0130.00x-x插件模块只能在ACOPOSmulti设备的轴2上使用;这对功能块也是如此。 |
功能块
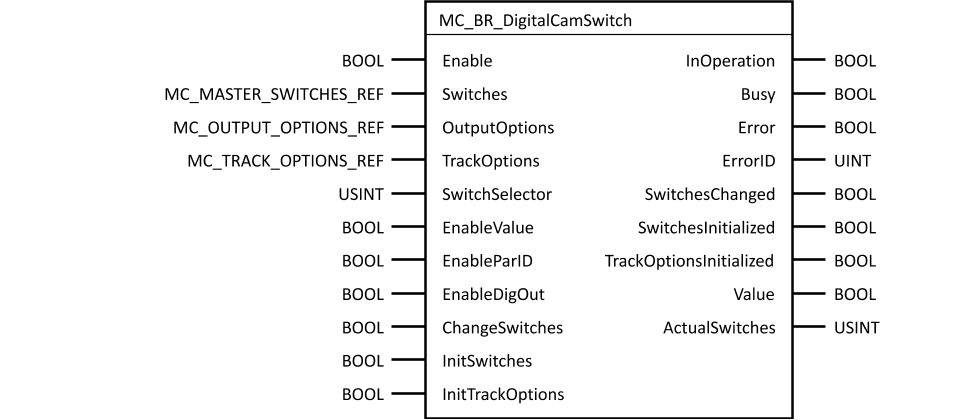
参数
输入/输出 |
参数 |
数据类型 |
描述 |
IN |
BOOL |
只要这个输入被设置,该功能块就处于激活状态。 |
|
IN |
Switches |
MC_MASTER_SWITCHES_REF |
切换数据的配置 该输入用于配置主轴、周期和开关数据。 |
IN |
OutputOptions |
MC_OUTPUT_OPTIONS_REF |
使用AC130插件模块时,信号输出对象引用 |
IN |
TrackOptions |
MC_TRACK_OPTIONS_REF |
特定轨迹设置对象引用 |
IN |
SwitchSelector |
USINT |
选择要启用或初始化的参数集 [0...4] |
IN |
EnableValue |
BOOL |
将轨道的状态输出到 "值 "的输出端 |
IN |
EnableParID |
BOOL |
使用 "指针ParID "将轨道的状态作为一个输入值,例如用于SPT功能块 |
IN |
EnableDigOut |
BOOL |
将轨道的状态输出到 "OutputOptions "输入所指定的数字输出通道上 |
IN |
ChangeSwitches |
BOOL |
使用 "SwitchSelector "输入指定的参数集来处理切换位置。 |
IN |
InitSwitches |
BOOL |
初始化用 "SwitchSelector "输入选择的参数集。 注意 激活参数集之中的参数不能被重新初始化。 |
IN |
InitTrackOptions |
BOOL |
在操作过程中输出切换动作时,初始化轨道的特定设置 |
OUT |
InOperation |
BOOL |
受控轨道激活 |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
SwitchesChanged |
BOOL |
表示改变开关量数据的命令已被传送。 |
OUT |
SwitchesInitialized |
BOOL |
新的切换数据被初始化 |
OUT |
TrackOptionsInitialized |
BOOL |
新的轨道特定设置被初始化 |
OUT |
Value |
BOOL |
轨道输出 |
OUT |
ActualSwitches |
USINT |
当前激活参数集的索引 [0...4] |
MC_MASTER_SWITCHES_REF 数据类型
参数 |
数据类型 |
描述 |
Master |
UDINT |
采集位置的轴对象引用 |
Period |
REAL |
如果正在使用非周期性的主轴或数字凸轮开关周期与主轴周期不匹配,则定义周期 [主轴PLCopen units] |
Switches |
MC_SWITCHES_REF[5] |
开关切换数据对象引用 |
MasterStartPosition |
DINT |
数字凸轮开关的周期 起始位置 注意: 对于一个周期性轴,起始位置与周期有关。 注意: 如果使用 "MasterParID",重新启动时内部不计算新值。这意味着,如果主轴位置可以从正值溢出到负值范围,这个值应该在每次启动前重新计算。否则,有可能在达到正的主轴启动位置之前,不会发生重新耦合。 |
MasterParID |
UINT |
这个ParID被用来代替位置设定点;0...使用位置设定点 注意。 当使用0以外的值时(即使是位置ParID),主轴的PLCopen系数不应用于涉及主轴的任何参数。 |
MC_SWITCHES_REF 数据类型
参数 |
数据类型 |
描述 |
FirstOnPosition |
REAL[64] |
开关开启的下限 [主轴PLCopen units] |
LastOnPosition |
REAL[64] |
开关开启的上限 [主轴PLCopen units] |
MC_TRACK_OPTIONS_REF 数据类型
参数 |
数据类型 |
描述 |
OnCompensation |
REAL |
开启延迟的补偿时间 [s] |
OffCompensation |
REAL |
关闭延迟的补偿时间 [s] |
Filter |
REAL |
滤波时间常数(用于速度生成以补偿开关延迟)[s]。 |
Hysteresis |
REAL |
从开关点(正负方向)开始的间隔,在此期间,输出不被切换,直到轴离开这个区域。这可以防止在开关点周围发生多次开关。[PLCopen单位的主] |
DisableNegativeDirection |
BOOL |
如果该输入被设置,只有当主轴在正方向移动时才会产生开关边沿。 注意: 设置 "InitTrackOptions "时,该值不会被重新初始化。 |
MC_OUTPUT_OPTIONS_REF 数据类型
参数 |
数据类型 |
描述 |
Axis |
UDINT |
通过指定 "DestinationParID "或使用AC130插件模块,创建SPT功能块和轨道输出的轴对象引用。 注意: 如果这里没有指定轴对象引用,就会使用主轴。 如果没有配置 "DestinationParID "和AC130插件模块,也可以使用这个输入,例如,防止主轴上的资源被耗尽。 |
DestinationParID |
UINT |
"Pointer ParID",可用于将轨道的状态写入输出,例如SPT功能块的输出(可选)。 注意。 这里只能指定有效值范围包括不同ParID的ParID(所有定义以"_PARID "结束的ParID)。 如果在此指定来自SPT功能块的输入ParID,则该SPT功能块必须在MC_BR_DigitalCamSwitch的 "Enable "输入被设置为 TRUE之前就已经创建 。 |
slot |
USINT |
ACOPOS/ACOPOSmulti插件模块的插槽 |
Channel |
USINT |
ACOPOS/ACOPOSmulti插件模块上输出的通道号 注意。 如果不使用AC130插件模块,必须为该输入和 "插槽 "指定数值 "0"。 |
本节的主题: