This function block can be used to set the parameters for reading an encoder that is not connected to a drive over the network. In addition to the encoder position, it is also possible to read status information and homing events. The function block returns a ParID on the drive that stores the encoder position for further use.
Requirements for use
This function block can only be used on SG4 target system.
This function block can only be used for axes on a POWERLINK network.
This function block does not work with virtual axes, SIM and SDC axes, or ACOPOS-2 devices (8V1xxx.xx-2).
The virtual encoder (ENCOD0) is configured by this function block and cannot be used elsewhere.
The encoder must be in the same POWERLINK network as the drive that is reading from it (e.g. X2X module on a bus controller).
Reading an encoder over a network results in considerably higher dead time than reading an encoder directly on a drive. The encoder position of a network encoder is therefore only suitable for control under certain circumstances.
PLCopen axis states in which the function block is permitted to be enabled
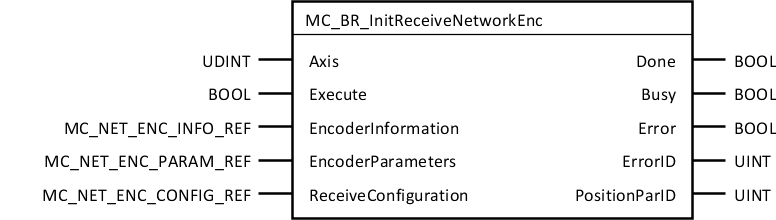
Function block
Parameter
I/O |
Parameter |
Data type |
Description |
IN |
UDINT |
Axis reference |
|
IN |
BOOL |
Execution of the function block begins on a rising edge of this input. |
|
IN |
EncoderInformation |
MC_NET_ENC_INFO_REF |
Information about the encoder in the network |
IN |
EncoderParameters |
MC_NET_ENC_PARAM_REF |
Parameter for reading the encoder data |
IN |
ReceiveConfiguration |
MC_NET_ENC_CONFIG_REF |
Configuration for processing the read encoder data |
OUT |
Done |
BOOL |
Command executed |
OUT |
Busy |
BOOL |
The function block is active and must continue to be called. |
OUT |
Error |
BOOL |
Error during execution |
OUT |
ErrorID |
UINT |
|
OUT |
PositionParID |
UINT |
ParID on the drive that holds the encoder position |
Table: Parameter MC_BR_InitReceiveNetworkEnc
Data type MC_NET_ENC_INFO_REF and examples
Data type MC_NET_ENC_INFO_REF
Parameter |
Data type |
Description |
Type |
USINT |
Type of encoder being read mcINC ... Incremental encoder mcINC_REF ... Incremental encoder with reference track mcINC_ABS ... Incremental encoder with absolute information (e.g. EnDat 2.1) mcABS ... Absolute encoder |
AdrDeviceString |
UDINT |
Address of the string with the name of the I/O module containing the data points for the position and other values. Note: The string must be structured like for the AsIOAccRead function block from the AsIOAcc library (e.g. 'SS1.IF2.ST3'). |
AdrPosition |
UDINT |
Address of the string with the name of the data point (channel name) for the encoder position. |
AdrPositionHW |
UDINT |
Address of the string with the name of the data point (channel name) for top 32 bits of the encoder position (if it exists). Note: |
AdrReferencePosition |
UDINT |
Address of the string with the name of the data point (channel name) for the reference event position. Note: Only required for type mcINC_REF. |
AdrReferenceCount |
UDINT |
Address of the string with the name of the data point (channel name) for the reference event position. Note: Only required for type mcINC_REF. |
AdrPositionTime |
UDINT |
Address of the string with the name of the data point (channel name) for the position timestamp. |
AdrEncoderStatus |
UDINT |
Address of the string with the name of the data point (channel name) for the encoder status. Note: Data point identifiable as "-Status" or "-Error". The data type of the data point is never permitted to be BOOL! |
Overview of parameters based on encoder type
Parameter |
mcINC |
mcINC_REF |
mcINC_ABS |
mcABS |
AdrPosition |
Required |
|||
AdrPositionHW |
Not possible |
Not possible |
Required for 64-bit position |
Required for 64-bit position |
AdrReferencePosition |
Not possible |
Required |
Not possible |
Not possible |
AdrReferenceCount |
||||
AdrPositionTime |
Optional if "ReceiveConfiguration.Interpolation" and ".Extrapolation" = mcOFF Required if "ReceiveConfiguration.Interpolation" or ".Extrapolation" = mcON Note: Urgently recommended in order to be able to detect encoder and network errors. |
|||
AdrEncoderStatus |
Optional Note: Using it makes it possible to respond to encoder errors. |
|||
Example with SinCos incremental encoder
I/O configuration X20DC1073 (sin/cos incremental encoder)
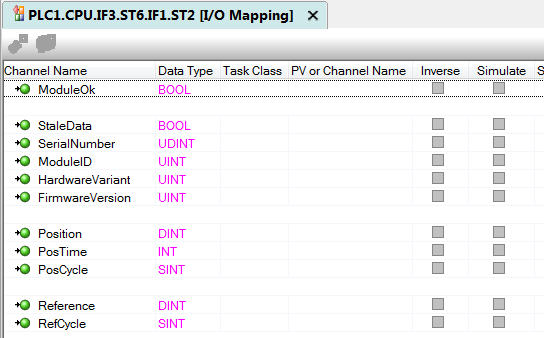
NetEncoderInfoRef.Type := mcINC_REF;
DeviceString := 'IF3.ST6.IF1.ST2';
Position := 'Position';
PositionTime := 'PosTime';
ReferencePosition := 'Reference';
ReferenceCount := 'RefCycle';
NetEncoderInfoRef.AdrDeviceString := ADR(DeviceString);
NetEncoderInfoRef.AdrPosition := ADR(Position);
NetEncoderInfoRef.AdrPositionTime := ADR(PositionTime);
NetEncoderInfoRef.AdrReferencePosition := ADR(ReferencePosition);
NetEncoderInfoRef.AdrReferenceCount := ADR(ReferenceCount);
Example with EnDat encoder
X20DS1928 I/O configuration (EnDat encoder)
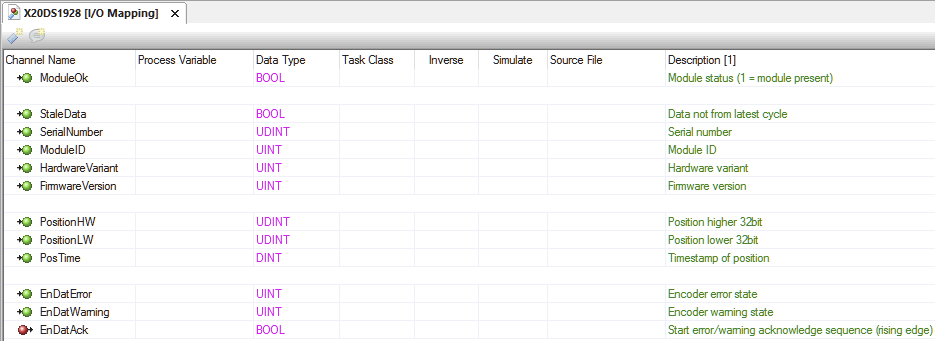
NetEncoderInfoRef.Type := mcINC_ABS; (or mcABS)
DeviceString := 'IF3.ST1.IF1.ST2';
Position := 'PositionLW';
PositionHW := 'PositionHW';
PositionTime := 'PosTime';
EncoderStatus := 'EnDatError';
NetEncoderInfoRef.AdrDeviceString := ADR(DeviceString);
NetEncoderInfoRef.AdrPosition := ADR(Position);
NetEncoderInfoRef.AdrPositionHW := ADR(PositionHW);
NetEncoderInfoRef.AdrPositionTime := ADR(PositionTime);
NetEncoderInfoRef.AdrEncoderStatus := ADR(EncoderStatus);
Data type MC_NET_ENC_PARAM_REF
Parameter |
Data type |
Description |
ScaleIncrements |
UDINT |
Increments per encoder revolution |
IncValueRangeHW |
UDINT |
"HighWord" range of values - upper word [Increments * 2^32] |
IncValueRangeLW |
UDINT |
"LowWord" range of values - lower word [Increments] |
ScaleUnits |
UDINT |
Units per encoder revolution (ScaleRevolutions) |
ScaleRevolutions |
UDINT |
Number of encoder revolutions (that result in ScaleUnits) |
CountDirection |
USINT |
Count direction of the encoder mcSTANDARD … Not inverted mcINVERSE … Inverted |
IncValueRangeLW/HW:
If the value range is larger than can be represented by the UDINT data type (2^32 = 4 294 967 296 ), this must be split into high and low ranges.
Details about the resolution of the encoder in bit or decimal form can be found in the data sheet for the encoder.
Measurement range of the encoder [Inc.] = Resolution [Inc./Rev] x multi-turn revolutions
Example 1 (23-bit multi-turn encoder)
EnDat multi-turn encoder with 23-bit (2^23 = 8 388 608 inc/rev) resolution and 12-bit (2^12 = 4096 rev) multi-turn revolutions
•Procedure:
•Multiply the resolution of the encoder with the number of multi-turn revolutions: 8 388 608 x 4096 = 34 359 738 368
•Compare whether this value > the UDINT limit (2^32 = 4 294 967 296). Answer for this example: Yes
•To simplify things, this number is converted to a hexadecimal (HEX) value (e.g. with Windows Calculator). In this example, the value is (2^35 =) 34 359 738 368 => 0x800000000 (HEX format).
•The hexadecimal format is better suited for grouping; 8 positions are grouped together: 0x(00000008) (00000000).
•This now results in the values "IncValueRangeLW" = 0x00000000 = 0 and "IncValueRangeHW" = 0x00000008 = 8.
Example 2 (13-bit multi-turn encoder)
EnDat multi-turn encoder with 13-bit (2^13 = 8 192 inc/rev) resolution and 12-bit (2^12 = 4096 rev) multi-turn revolutions
•Procedure:
•Multiply the resolution of the encoder with the number of multi-turn revolutions: 8192 x 4096 = 33 554 432
•Compare whether this value > the UDINT limit (2^32 = 4 294 967 296). Answer for this example: No
•This now results in the values "IncValueRangeLW" = 33 554 432 and "IncValueRangeHW" = 0x00000000 = 0.
Example 3 (programmable multi-turn encoder)
Multi-turn encoder with 500 000 inc/rev and 10 000 multi-turn revolutions
•Procedure:
•Multiply the resolution of the encoder with the number of multi-turn revolutions: 500 000 x 10 000 = 5 000 000 000
•Compare whether this value > the UDINT limit (2^32 = 4 294 967 296). Answer for this example: Yes
•To simplify things, this number is converted to a hexadecimal (HEX) value (e.g. with Windows Calculator). In this example, the value is 5 000 000 000 => 0x12A05F200 (hex HEX format)
•The hexadecimal format is better suited for grouping; 8 positions are grouped together: 0x(00000001) (2A05F200).
•This now results in the values "IncValueRangeLW" = 0x2A05F200 = 705 032 704 and "IncValueRangeHW" = 0x00000001 = 1.
Example 4 (incremental encoder)
When using an incremental encoder, only position counters with 16 or 32 bits are supported.
•Procedure
•Checking the data type of the position counter
•With a 16-bit data type (INT, UINT), "IncValueRangeLW" = 0x00010000 = 65536 and "IncValueRangeHW" = 0x00000000 = 0 are set.
•With a 32-bit data type (DINT, UDINT), "IncValueRangeLW" = 0x00000000 = 0 and "IncValueRangeHW" = 0x00000001 = 1 are set.
Data type MC_NET_ENC_CONFIG_REF
Parameter |
Data type |
Description |
Timeout |
REAL |
If values are not refreshed during this time, processing is aborted and an error message [s] is generated. Range of values: 0.0004 - 0.0163 |
Interpolation |
BOOL |
If the network cycle time is > 400µs, interpolation of the read encoder position can be activated here. mcOFF... 0 (default) mcON.... 1 Note: Activating interpolation increases dead time (+1 POWERLINK cycle) |
Extrapolation |
BOOL |
If no new encoder positions are received for one or several network cycles, it is possible to activate extrapolation of the encoder position here. mcOFF... 0 (default) mcON .... 1 |
FilterTime |
REAL |
Time constant for position filter [s] Default: 0.0 … Filter is disabled Range of values: 0.0 - 1000.0 |
NetworkCompensation |
REAL |
The position is pre-calculated by this amount of time. This parameter can be used to compensate for network transfer times. Default 0.0 … Pre-calculation is disabled Range of values: 0.0 - 1.0 Note: When the speed changes, the pre-calculated position may deviate significantly from the actual position. |
Topics in this section: