只要相应的功能块输入保持设置,该功能块就会按照定义的参数在指定的方向上执行运动。
与 MC_BR_JogVelocity的区别 在于,可以指定两个极限位置。然后轴可以在这两个位置之间进行点动运动。
当用 "JogPositive "或 "JogNegative "输入开始运动时,轴立即切换到 离散运动 状态。
使用要求
•用于SG3/SGC目标系统的功能块名称:MC_084BR_JogLimitPosition
允许启用该功能块的PLCopen轴状态
•静止
•离散运动
•连续运动
•同步运动
•停止 (不可以启动运动)
功能块
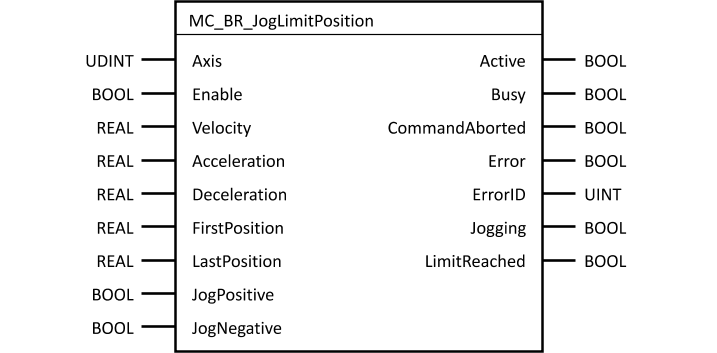
参数
I/O |
参数 |
数据类型 |
描述 |
IN |
UDINT |
轴对象引用 |
|
IN |
BOOL |
功能块的执行在该输入的上升沿开始 |
|
IN |
Velocity |
REAL |
最大速度 [PLCopen units/s] 注意: 这个值可以在运动进行中改变。 |
IN |
Acceleration |
REAL |
最大加速度 [PLCopen units/s²] 注意: 这个值可以在运动进行中改变。 |
IN |
Deceleration |
REAL |
最大减速度 [PLCopen units/s²] 注意: 这个值可以在运动进行中改变。 |
IN |
FirstPosition |
REAL |
点动运动的 "下限 "位置 [PLCopen units] |
IN |
LastPosition |
REAL |
点动运动的 "上限 "位置 [PLCopen units] |
IN |
JogPositive |
BOOL |
在正方向上执行一个运动 |
IN |
JogNegative |
BOOL |
在负方向上执行一个运动 |
OUT |
Active |
BOOL |
功能块激活,可以执行运动 |
OUT |
Busy |
BOOL |
该功能块处于激活状态,必须持续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
Jogging |
BOOL |
运动执行中 |
OUT |
LimitReached |
BOOL |
表示轴已达到两个极限位置中的一个 |
本节的主题: