•开始设置控制器的流程
•将收集的参数保存到初始参数模块中
•中止正在进行的设置流程
信息: 在启用该功能块时,不应启用该轴的其他功能块。这样做可能会对结果产生不利影响。 |
使用要求
•用于SG3/SGC目标系统的功能块名称:MC_059BR_SetupController
•如果该功能块与ACP10SIM轴一起使用,必须设置仿真模式 "完全"。
允许启用该功能块的PLCopen轴状态
"命令" |
允许启用该功能块的PLCopen轴状态 |
所有PLCopen轴状态,对PLCopen轴状态没有影响 |
|
所有PLCopen轴状态,对PLCopen轴状态没有影响 |
功能块
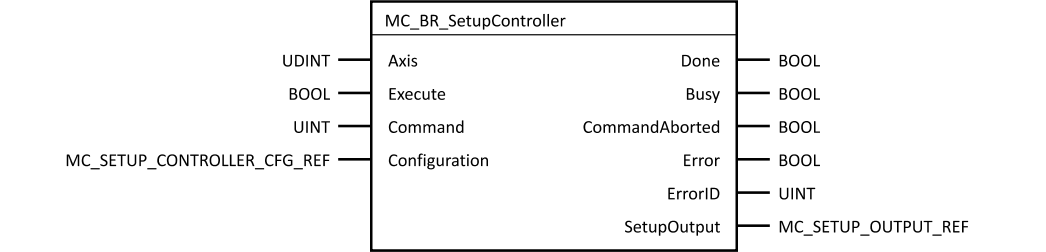
参数
输入/输出 |
参数 |
数据类型 |
描述 |
IN |
UDINT |
编码器对象参考 |
|
IN |
BOOL |
该功能块的执行在该输入的上升沿开始。 |
|
IN |
Command |
UINT |
选择命令: mcFINISH (仅适用于模式 "mcFF... + mcPASSIVE") (V5.050及以上版本) |
IN |
Configuration |
MC_SETUP_CONTROLLER_CFG_REF |
操作所需的输入参数 |
OUT |
Done |
BOOL |
执行成功 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须持续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
OUT |
Error |
BOOL |
执行期间出错 |
OUT |
ErrorID |
UINT |
|
OUT |
SetupOutput |
MC_SETUP_OUTPUT_REF |
输出结构体 |
表: 参数 MC_BR_SetupController
MC_SETUP_CONTROLLER_CFG_REF 数据类型
参数 |
数据类型 |
描述 |
DatObj |
MC_DATOBJ_REF |
用于存储设置数据的参数 |
SetupControllerPar |
MC_SETUP_CONTROLLER_PAR_REF |
设置配置的参数 |
MC_DATOBJ_REF 数据类型
参数 |
数据类型 |
描述 |
Name |
STRING[32] |
数据对象的名称 注意: BR数据对象的名称限制在八个字符。 |
Type |
UINT |
mcDATOBJ ... BR数据对象被创建 |
Format |
UINT |
必须设置为0 |
Device |
STRING[32] |
不与此功能块一起使用 |
MC_SETUP_CONTROLLER_PAR_REF 数据类型
参数 |
数据类型 |
描述 |
Mode |
UINT |
选择控制器设置的模式 mcSPEED ... 速度控制器 mcSPEED + mcISQ_F1_NOTCH ... 以 "isq_filter1 "为notch的速度控制器 mcSPEED + mcT_FILTER ... 带有"t_filter"的速度控制器 mcSPEED + mcT_FILTER + mcISQ_F1_NOTCH ... 以 "isq_filter1 "为notch的带有"t_filter"的速度控制器 mcSPEED + mcT_FILTER_2 ... 带有"t_filter"(模式 2)的速度控制器 (V2.410及以上版本) mcSPEED + mcT_FILTER_2 + mcISQ_F1_NOTCH ... 以 "isq_filter1 "为notch的带有"t_filter"(模式 2)的速度控制器 (V2.410及以上版本) mcSPEED + mcUSE_FILTER_PAR ... 已经配置好滤波器的速度控制器 (V2.250及以上版本) mcSPEED + mcUSE_FILTER_PAR + mcUSE_TN ... 已经配置好滤波器和"tn"的速度控制器 (V2.410及以上版本) mcSPEED + mcTUNE_TN ... 已经配置好积分部分的复位时间的速度控制器 (V3.170及以上版本) mcSPEED + mcTUNE_TN + mcUSE_FILTER_PAR ... 已经配置好积分部分的复位时间和滤波器的速度控制器 (V3.170及以上版本) mcSPEED + mcTUNE_TN + mcISQ_F1_NOTCH ... 已经配置好积分部分的复位时间和以"isq_filter1"作为notch的速度控制器(V3.170及以上版本) mcISQ_F1_NOTCH... 仅以"isq_filter1"作为notch mcISQ_F1_NOTCH + mcISQ_F2_NOTCH ... ...以"isq_filter1" 和 "isq_filter2" 作为notch (V2.250及以上版本) mcISQ_F1_NOTCH + mcISQ_F2_NOTCH + mcISQ_F3_NOTCH ... 以"isq_filter1" 、 "isq_filter2" 和 "isq_filter3" 作为notch (V2.250及以上版本) mcPOSITION ... 位置控制器 mcTEST ... 控制器测试 mcFF ... 前馈控制 mcFF_POS_MOVE ... 前馈控制,只在正方向上运动 mcFF_NEG_MOVE ... 前馈控制,只在负方向上运动 mcFF + mcPASSIVE ... 被动的前馈控制(没有独立的运动) (V5.050及以上版本) mcFF_POS_MOVE + mcPASSIVE ... 被动的前馈控制,只在正方向上运动(没有独立的运动) (V5.050及以上版本) mcFF_NEG_MOVE + mcPASSIVE ... 被动的前馈控制,只在正方向上运动(没有独立的运动) (V5.050及以上版本) |
Orientation |
USINT |
选择控制器设置的方向 mcHORIZONTAL (V2.260及以上版本) mcVERTICAL (V2.260及以上版本) |
OperatingPoint |
USINT |
选择控制器设置的操作点 mcTUNE_STANDSTILL (V2.430及以上版本) mcTUNE_V_CONSTANT (V2.430及以上版本) 注意: mcTUNE_V_CONSTANT 只允许与 mcHORIZONTAL结合使用 |
MaxCurrentPercent |
REAL |
设置期间使用的额定电流的百分比 [%] |
MaxSpeedPercent |
REAL |
相对于极限值的最大运动速度[%](仅与前馈控制模式有关)。 |
MaxDistance |
REAL |
设置期间的最大移动距离[轴单位](仅与前馈控制模式有关) |
MaxLagError |
REAL |
设置过程中允许的最大滞后误差[轴单位]。 |
PropAmplificationPercent |
REAL |
设置过程中确定的比例增益的百分比,将用于控制参数[%] 。 (V2.400及以上版本) 注意: 值范围:50 - 150%.如果指定值为 "0",将使用默认值(100%)。 |
SignalOrder |
UDINT |
激励信号的顺序(7...11,0对应于9)。 (V2.430及以上版本) |
MaxPropAmplification |
REAL |
Maximum proportional gain (V3.000及以上版本) [As] 用于模式 mcSPEED [1/s] 用于模式 mcPOSITION |
Acceleration |
REAL |
加速度 [units/s²] (V3.000及以上版本) |
SignalType |
UINT |
激励信号的类型 (V3.130及以上版本) mcSIGNAL_PRBS ... 标准 mcSIGNAL_CHIRP ... Chirp (线性频率调制) mcSIGNAL_CHIRP_TRAPEZOID ... Chirp (线性频率调制) 附加梯形振幅响应 |
SignalStartFrequency |
REAL |
激励信号的起始频率 [Hz] (仅针对chirp信号类型) (V3.130及以上版本) 值范围: "模式" mcPOSITION, mcTEST ... 0 - 1250 [Hz] "模式" 其他 ... 0 - 2500 [Hz] 注意: 必须 ≤ "SignalStopFrequency "且 ≤ TUNE_INERTIA_F_LOWER(默认值:10 [Hz])。 如果在这里指定值 "0",则启动频率的值由停止频率决定。 |
SignalStopFrequency |
REAL |
激励信号的停止频率 [Hz] (仅针对chirp信号类型) (V3.130及以上版本) 值范围: "模式" mcPOSITION, mcTEST ... 0 - 1250 [Hz] "模式" 其他 ... 0 - 2500 [Hz] 注意: 必须 ≥ "SignalStartFrequency "且 ≥ TUNE_INERTIA_F_UPPER(默认值:40[Hz])。 如果在此指定数值 "0",则使用极限值(1250或2500)。 |
SignalTime |
REAL |
激励信号的持续时间 [s] (仅针对chirp信号类型) (V3.130及以上版本) 注意: 只有在 "SignalStartFrequency" ≠ "0 " 时,才允许 数值 ≠ "0 " 如果这里指定的是 "0",激励信号的持续时间的值是由停止频率决定的。 |
MC_SETUP_OUTPUT_REF 数据类型
参数 |
数据类型 |
描述 |
Quality |
REAL |
参数识别的质量[%](目前未写入)。 0 - 50% ... 无法使用 50 - 70% ... 可以使用 70 - 90% ... 良好 90 - 100% ... 非常好 |
DataObjectIdent |
UDINT |
存储数据对象的ID |
本节的主题: