该模式非常适用于在整个机械负载运动范围内提供唯一位置值的绝对值编码器。使用零点偏移,编码器在整个运动范围内指示的硬件位置HW可以表示为正确的机器位置SW(软件位置)。
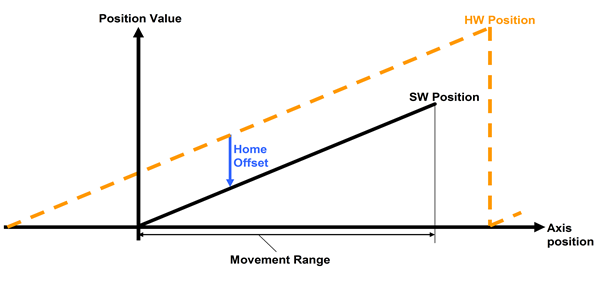
图: 回零偏移
回零偏移可以通过一次性指定一个参考位置(比如标定一个机械零位)来确定。
时序图
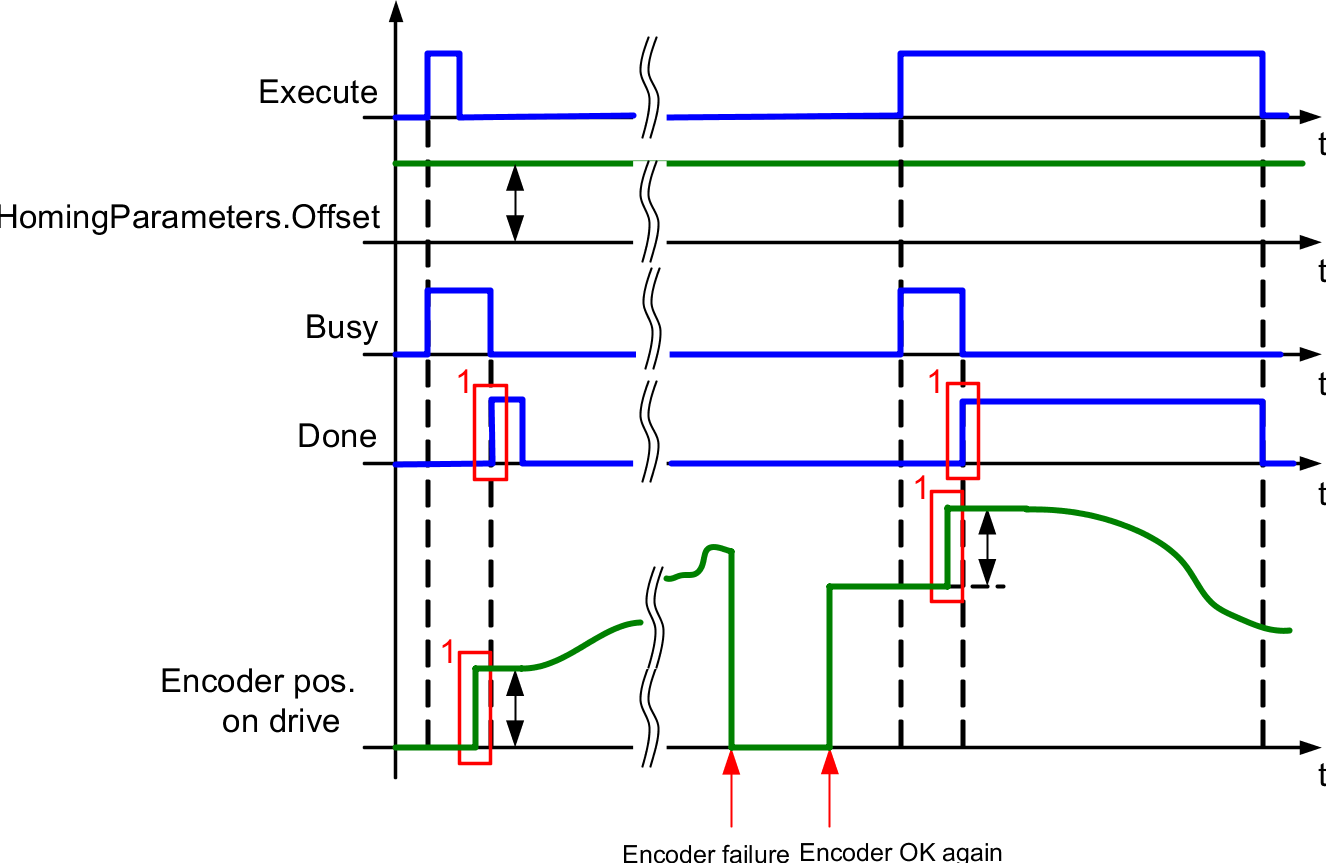
图: mcHOME_ABSOLUTE的时序图
1 |
参数传输完成 |
确定回零偏移量
以下几点描述了在调试期间确定绝对值编码器的偏移量的顺序。
1,将编码器移到参考位置(其实就是将负载移动到机械行程范围内的一个参考点位置,比如机械零位)。
2,执行功能块 MC_BR_HomeAcpEncoder ,参数如下。
"HomingParameters.HomingMode = mcHOME_DIRECT"
"HomingParameters.ReadOffset = TRUE"
"HomingParameters.position = 0.0"(或等于参考点位置,如果它是 ≠ "0")。
3,如果功能块 MC_BR_HomeAcpEncoder 报告 "Done = TRUE",输出 "EncoderOffset "的值可用于 "HomingParameters.HomingMode = mcHOME_ABSOLUTE"的编码器的回零 。该编码器零点偏移值应储存在永久内存和/或配方文件中。