该功能块可用于对一个Acp驱动器上的外部编码器执行回零。外部编码器是指不用于伺服驱动器内部闭环位置控制的编码器。 MC_Home 功能块必须用于闭环位置控制的编码器。
使用要求
•用于SG3/SGC目标系统的功能块名称:MC_039BR_HomeAcpEncoder
•此功能对虚轴不可用。如果为虚轴调用该功能,该功能块将返回错误 29235。该功能对当前轴类型不可用。
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态没有影响
功能块
参数
I/O |
参数 |
数据类型 |
描述 |
IN |
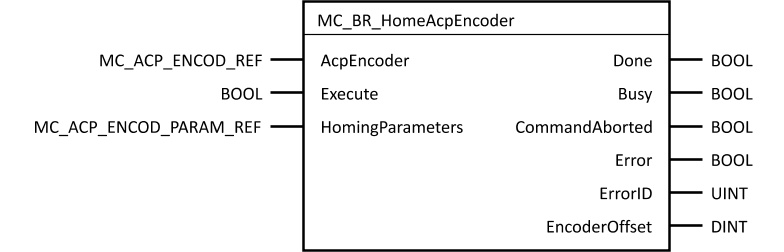
AcpEncoder |
MC_ACP_ENCOD_REF |
编码器对象参考 |
IN |
BOOL |
该功能块的执行在该输入的上升沿开始。 命令:回零 |
|
IN |
HomingParameters |
MC_ACP_ENCOD_PARAM_REF |
编码器回零的参数 |
OUT |
Done |
BOOL |
执行成功。功能块执行完毕。 编码器已回零。 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须持续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
OUT |
Error |
BOOL |
执行期间出错 |
OUT |
ErrorID |
UINT |
|
OUT |
EncoderOffset |
DINT |
回零动作完成后的零点偏移量 轴单位(Axis units) 这个值只有在 "HomingParameters.ReadOffset "设置为 TRUE时才会输出 。 |
表: 参数 MC_BR_HomeAcpEncoder
MC_ACP_ENCOD_REF 数据类型
参数 |
数据类型 |
描述 |
Axis |
UDINT |
轴参考 |
slot |
USINT |
驱动器上用于读取外部编码器的槽位 |
MC_ACP_ENCOD_PARAM_REF 数据类型
参数 |
数据类型 |
描述 |
HomingMode |
USINT |
回零模式: mcHOME_RESTORE_POS (V2.430及以后版本) |
ReadOffset |
BOOL |
TRUE ... 读取回零动作完成后的零点偏移量,并将其输出到 "EncoderOffset "输出。 FALSE ... 不读取零点偏移。在 "EncoderOffset "输出端输出 "0"。 |
Position |
REAL |
回零成功后的位置[轴单位] 注意: 只在模式 mcHOME_DIRECT 和 mcHOME_REF_PULSE中评估 。 |
Offset |
DINT |
零点偏移(编码器偏移)[轴单位] 注意: 只在模式 mcHOME_ABSOLUTE中被评估。 |
本节的主题: