在这个功能块回零模式中,轴结构体成员中move.homing.parameter中的元素 "mode "和 "ref_pulse "被永久地写入以下数值。轴结构体成员move.homing.parameter中的所有其他元素可以根据以下例子进行选择。
mode = ncHOME_OFFSET + ncCORRECTION ref_pulse = ncOFF |
|
在这种回零模式下,在设定回零偏移量后进行一个检查,以确定软件位置(机器位置)是否在软限位所定义的运动范围内。如果不是这样,定义的回零偏移(Homing offset)将被做如下修正:
Software position < Movement rangeTest minimum
→ Homing offsetCorrected = Homing offsetDefined + Encoder counting range
Software position > Movement rangeTest maximum
→ Homing offsetCorrected = Homing offsetDefined - Encoder counting range
当驱动器开启时,通过将编码器计数范围对称放在软限位所定义的运动范围的中心,计算出上述Movement rangeTest的最小和最大运动范围值。计算如下:
OffsetTest = (Encoder counting range - Movement rangeSoftwareEndPositions) / 2
Movement rangeTest minimum = Negative software end position - OffsetTest
Movement rangeTest maximum = Positive software end position + OffsetTest
如果编码器在整个负载运动范围内返回唯一的位置值,但在负载运动范围内发生编码器溢出,则在使用绝对编码器时需要进行编码器计数范围修正。
在这种情况下,回零偏移值取决于驱动器开启后 伺服轴位置是在编码器位置溢出点的右边还是左边。
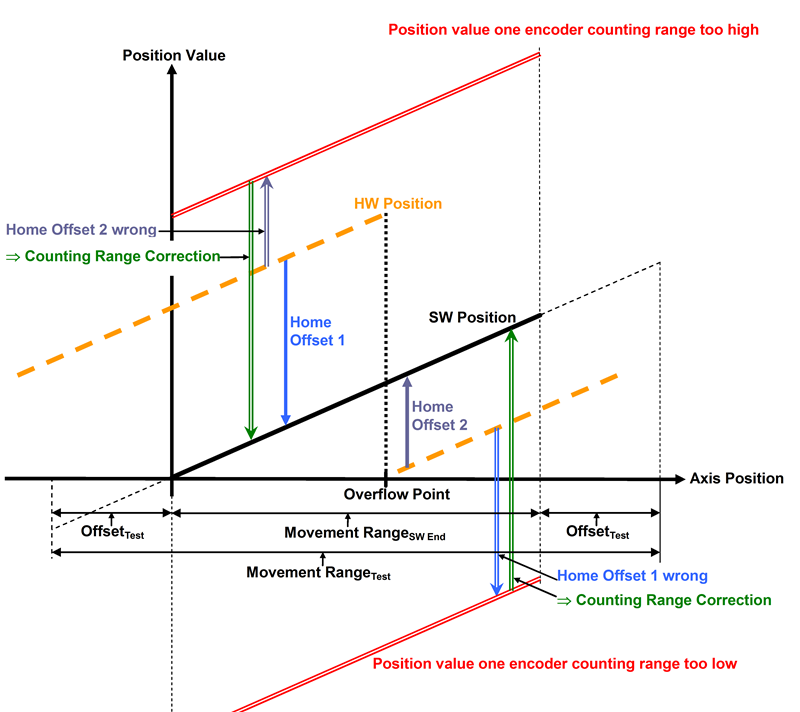
图: 模式Home_ABSOLUTE_CORR 回零偏移
在溢出点的右边,homing offset 1 对左边有效,但是对于右边会导致一个错误的位置值。在溢出点的左边, homing offset 2对右边有效,但是在左边会导致一个不正确的位置值。这可以用编码器计数范围校正来补偿。
信息: 只有当编码器范围大于运动范围时,编码器计数范围校正才会起作用! |
信息: 如果回零偏移大于223, 建议使用 mcHOME_AXIS_REF进行回零。这样 可以避免由于 功能块输入的 数据类型 REAL而造成的 精度损失 。 |