mcV_LIMIT_OFF (禁用速度限制)
使用这个选项,"NegMaxVelocity "和 "PosMaxVelocity "的速度限制被禁用。这些输入可以用任何数值写入,不再有任何影响。
注意事项! 如果由于功能块的输入设置导致负载轴超过了各自的速度限制,设定扭矩将不会做出调整响应(比如降低扭矩来保持速度稳定)。这可能导致在负载不足的情况下轴的速度过高(对机器及其部件有危险)。 |
为了使用模式 "+mcTIME_LIMIT",轴的速度极限需要被限制。
mcCHECK_HOMING_OFF (不检查是否以回零)
功能块可以在轴没有事先回零的情况下启动(但这仍然只能从静止状态开始)。
信息: 试图用基础运动功能块(比如绝对定位)中止功能块,将报告错误 29205: 轴没有回零。 |
mcTIME_LIMIT (自动停止)
如果轴以极限速度或极限加速度运动了一定时间(秒), MC_BR_TorqueControl 应自动结束,并发出错误信息(见 输入 "TimeLimit")。
"AxisLimitActive "持续提供输出。
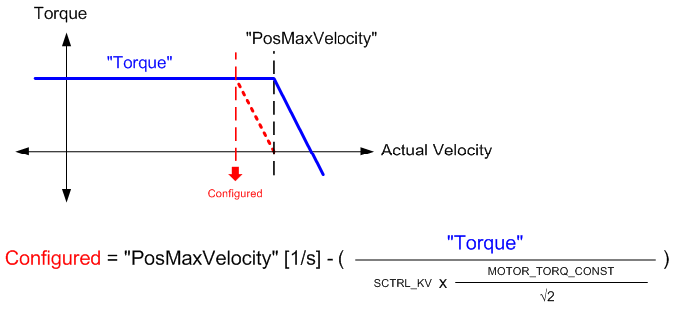
mcV_LIMIT_CALC (极限速度误差的自动补偿)
如果通过 "模式 "启用该选项,那么驱动器上的速度限制将被设置为一个计算系数,该系数小于或大于 "XxxMaxVelocity "输入的指定值。这种配置的结果是,配置的速度限制不会被超过。
信息: 使用 "TorqueParID "输入时,不可能进行计算,因为扭矩设定值只在驱动器上可用。当使用 "TorqueParID "时,该模式没有影响。 |
如果极限值过于接近,则由于计算参数的重叠而无法使用。 将报告错误 29217:无效的输入参数 。
使用 "PosMaxVelocity "的计算实例
信息: 根据参数的不同,一个新的 "扭矩 "值可能会导致 在斜坡期和电机没有负载时的 不同速度。这些值是根据静止状态(如果 "InTorque "被报告)计算的。 |