This function block starts a cam link between the master and slave axis. It is possible to configure a cam followed by a standstill.
This function block has the following functions:
•Execution of a cam coupling (like MC_CamIn).
•The 1:1 cam predefined on the drive can be used (mcLINEAR_CAM).
•A standstill phase can be defined after the cam by setting "MasterDwellDistance > 0". This results in the following movement sequence: Cam – Standstill – Cam – Standstill – …
•A lead-in or lead-out movement can be started while the master axis is running. The slave axis does not move before the lead-in or after the lead-out movement.
•A compensation distance can be specified for the lead-in and lead-out movement.
•An offset can be specified in the cam for the lead-in and lead-out movement.
Setting the "Enable" input switches the axis to the PLCopen Synchronized Motion state and transfers all necessary parameters to the respective drives.
The "Active" output is set after the parameters have been transferred. In this way, the coupling can be started when the "LeadInSignal" input is set or the ParID specified for "LeadInParID" changes from 0 to a value ≠ 0.
The movement can be stopped when the "LeadOutSignal" input is set or the ParID specified for "LeadOutParID" changes from 0 to a value ≠ 0.
If the "Enable" input is set to FALSE, the movement is stopped and the axis changes to the PLCopen axis state Standstill.
The cam can be shifted on the master side with the MC_Phasing or MC_BR_Phasing function block.
An offset shift on the slave side can be implemented using the MC_BR_Offset function block.
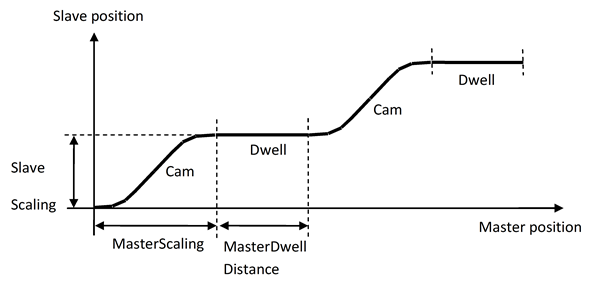
After the lead-in signal, the slave axis performs a cam movement, followed by a standstill phase. The cam listed in the "CamTableID" can be scaled using the "MasterScaling" and "SlaveScaling" inputs. The duration of the standstill phase of the slave axis can be specified using the "MasterDwellDistance" input. This movement is repeated until the "LeadOutSignal" input is set or the ParID specified for "LeadOutParID" has a value ≠ 0.