该功能块用于读取从轴的Cam Profile Automat位置。
即使在运动停止或轴出错之后,Cam Profile Automat的位置也会继续被计算。然后,它可能偏离轴的设定位置点。
为了能够在正确的从轴位置上重新启动自动序列automat, 必须使用功能块 MC_BR_ReadAutPosition 来读取凸轮自动序列automat的位置,并且必须使用功能块 MC_MoveAbsolute (方向:<...>+ mcAUTOMAT_POS)来将从轴移动定位到凸轮自动序列cam automat位置。然后可以重新启动automat(MC_BR_AutControl,输入 "Restart重新启动")。
对于周期性轴,在周期内输出位置。
通过该功能块读取自动序列automat的位置,并通过 MC_MoveAbsolute定位轴 ,可以在与自动序列automat位置不同的位置(例如在下一个或上一个从轴周期内)重新启动自动序列automat。
警告! 在重新启动Restart过程中,主轴必须保持不动,以便在重新启动过程中,Cam Profile Automat的位置不发生变化(读取位置,再移动到该位置,重新启动automat)! |
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_046BR_ReadAutPosition
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态无影响
功能块
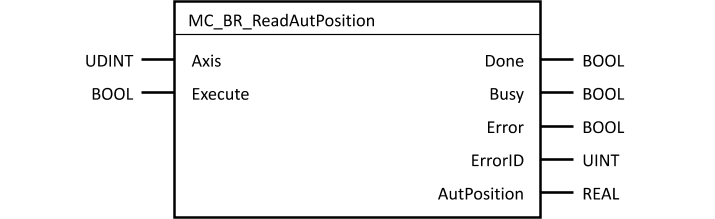
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
UDINT |
轴对象引用(automat从轴的)。 |
|
IN |
BOOL |
在上升沿读取automat的位置 |
|
OUT |
Done |
BOOL |
执行成功。功能块完成。 完成读取automat的位置 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须持续调用。 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
AutPosition |
REAL |
Automat的位置 |
表: 参数 MC_BR_ReadAutPosition
本节的主题:
• 错误代码 |