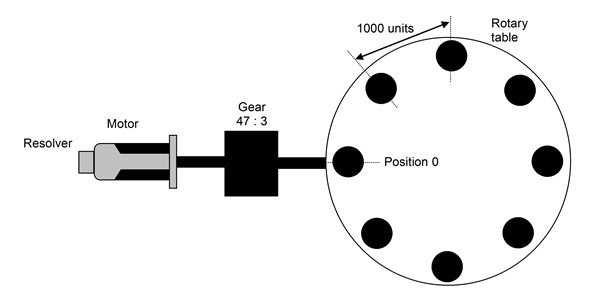
一个包含8个产品支架的旋转台正在被控制。产品支架之间的空间(=负载周期)等于1000个单位。一个齿轮比为47:3的齿轮位于电机和旋转台之间。电机有一个测量系统,可以绝对捕捉到电机的转数。由于高齿轮比,关闭时负载不能移动。
1.参数设置
INIT初始化参数模块:
encoder_if.parameter.scaling.load.units = 24000(1000 * 8 * 3)
encoder_if.parameter.scaling.load.rev_motor = 47
NC mapping映射表:
在 "附加数据 "中 … PLCopen_ModPos="1000,1"
MC_BR_InitModPos 功能块也可以用来改变周期和系数,而不是说只能通过映射表或在启动控制器后进行改变。 (然而, 这必须在调用 MC_Home 回零之前完成 )。
2.一次性读取位置(在启动过程中校准)
测量负载位置或将旋转台设置到0位置,轴被回零到这个位置或使用立即回零模式 "mcHOME_DIRECT"回零到0。
3.位置变化
一旦轴处于运动状态(MC_ReadActualPosition),位置在0和999之间变化。
4.恢复位置
在目标PLC系统热启动或冷启动后,伺服驱动器被上电打开(MC_Power)。 现在以 "mcHOME_RESTORE_POS" 回零模式调用MC_Home。如果 MC_Home 将输出 "Done "设置为 "TRUE",则位置被恢复。 然后,MC_ReadActualPosition 读出的位置表示负载在周期内的正确位置,轴可以使用任何功能块移动。