该功能块可用于对指定轴的加速扭矩进行限制。它是在轴的路径上定义的,也可以在当前运动中启用或禁用。指定轴的实际位置被用来作为扭矩限制的实时参考。
使用实例:注塑机的模具保护
生产周期的节拍在模具打开时作为开始点。
1.为了更快地加速,扭矩限制被设定为一个非常高的值。
2.在某一位置,扭矩应限制在一个非常低的值,以便在轴的运动区域出现异物时保护模具不被损坏。
3.当模具关闭时,扭矩限制就可以调回最大值,以便为注射流程建立必要的合模力。
信息:
该功能对虚拟轴不可用。如果对一个虚拟轴调用该功能,该功能块将返回错误 29235: 该功能对当前轴类型不可用 |
使用要求
•用于SG3/SGC目标系统的功能块名称:MC_093BR_LimitLoadCam
允许启用该功能块的PLCopen轴状态
所有PLCopen轴状态,对PLCopen轴状态没有影响
信息:
该功能块对SDC接口的轴不起作用。 |
信息:
该功能块对 MC_BR_VelocityControl的 "TorqueMode"= mcFF所指定的扭矩没有影响 。 |
功能块
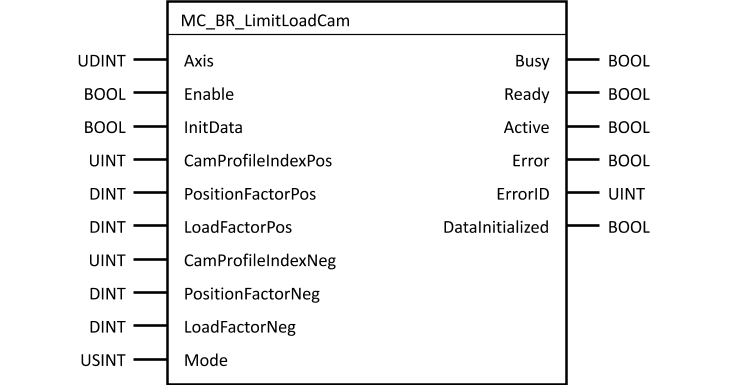
参数
I/O |
参数 |
数据类型 |
描述 |
IN |
UDINT |
轴对象引用 |
|
IN |
BOOL |
只要这个输入被设置,该功能块就处于活动状态。 |
|
IN |
InitData |
BOOL |
当功能块处于活动状态时,该输入的上升沿会导致参数的改变。 注意: 对 "模式 "输入的改变不被应用。 |
IN |
CamProfileIndexPos |
UINT |
正方向的凸轮数据的索引 (1...20) 注意: 为了不启用这个方向的限制,指定值为 "0",或者输入端保持开放。 注意: 索引为15-20的凸轮数据允许有一个初始Y值 ≠0。 |
IN |
PositionFactorPos |
DINT |
正方向的轴位置的乘法系数 |
IN |
LoadFactorPos |
DINT |
正方向的扭矩的乘法系数 |
IN |
CamProfileIndexNeg |
UINT |
负方向的凸轮数据的索引 (1...20) 注意: 为了不启用这个方向的限制,指定值为 "0",或者输入端保持开放。 注意: 索引为15-20的凸轮数据允许有一个初始Y值 ≠0。 |
IN |
PositionFactorNeg |
DINT |
负方向的轴位置的乘法系数 |
IN |
LoadFactorNeg |
DINT |
负方向的扭矩的乘法系数 |
IN |
Mode |
USINT |
扭矩限制模式: mcWITH_FF ... 0 mcWITHOUT_FF ... 1 注意: 这只在 "Enable "输入的上升沿应用。 |
OUT |
Busy |
BOOL |
功能块启用(启用=1) |
OUT |
Ready |
BOOL |
功能块输入端的参数已成功初始化;限制器已准备好。 |
OUT |
Active |
BOOL |
限制是激活的。 |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
DataInitialized |
BOOL |
以 "InitData"= TRUE开始的参数传输 已完成 |
表:参数 MC_BR_LimitLoadCam
本节的主题: