该功能块将一个用速度运动曲线确定的偏移量添加到从轴位置(给到从轴附加轴)。可以在功能块输入上循环设定速度(CyclicVelocity),或直接在驱动器上使用 "ParID输入"。此外,该功能块还提供了使用 "TriggerParIDs "启用正反方向的速度曲线的可能性。
这个功能块可以和其他启动耦合的功能块(MC_GearIn、 MC_GearInPos、 MC_CamIn、 MC_BR_AutControl等)一起使用。
使用要求
•用于SG3/SGC目标系统的功能块名称 MC_088BR_OffsetVelocity
•如果该功能块与 MC_BR_AutCommand 或 MC_BR_AutControl 功能块一起使用 ,则不可能使用从轴附加轴接口(ParID ACP10PAR_AUT_SL_ADD_AXIS)!
允许启用功能块的PLCopen轴状态
•Enable:所有PLCopen轴状态,对PLCopen轴状态没有影响
•开始偏移:只在从轴处于 同步运动中进行!
功能块
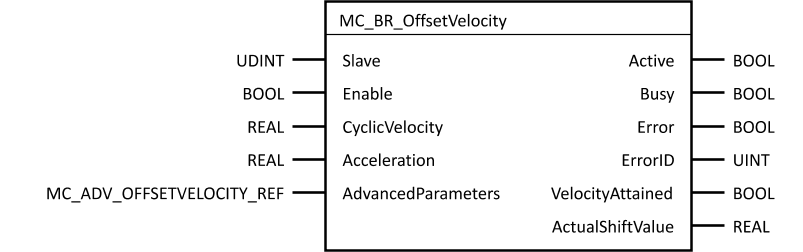
参数
输入/输出 |
参数 |
数据类型 |
描述 |
IN |
Slave |
UDINT |
从轴 轴对象引用 |
IN |
BOOL |
只要这个输入被设置,该功能块就处于活动状态。 |
|
IN |
CyclicVelocity |
REAL |
循环传输的附加速度[从轴的PLCopen单位/s]。 请注意: 这个值也可以是<0。 |
IN |
Acceleration |
REAL |
实现偏移的加速度[从轴的PLCopen单位/s²]。 |
IN |
AdvancedParameters |
MC_ADV_OFFSETVELOCITY_REF |
使用高级功能的结构 |
OUT |
Active |
BOOL |
有可能执行一个偏移 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续被调用。 功能块启用 (Enable = 1) |
OUT |
Error |
BOOL |
执行过程中出错 |
OUT |
ErrorID |
UINT |
|
OUT |
VelocityAttained |
BOOL |
附加速度达到完成 |
OUT |
ActualShiftValue |
REAL |
驱动器上的当前偏移值[从轴的PLCopen单位]。 |
表: 参数 MC_BR_OffsetVelocity
MC_ADV_OFFSETVELOCITY_REF 数据类型
参数 |
数据类型 |
描述 |
VelocityParID |
UINT |
从中读取偏移速度的ParID 请注意: 如果这里指定了ParID,"CyclicVelocity "输入不再起作用。 |
PosVelocityTriggerParID |
UINT |
触发 增加 "CyclicVelocity"设定的速度或 "VelocityParID"中ParID速度 的ParID ParID的值 <> 0 ... 速度增加 ParID的值=0 ......速度不增加 |
NegVelocityTriggerParID |
UINT |
触发 减去 "CyclicVelocity"设定的速度或 "VelocityParID"中ParID速度 的ParID ParID的值 <> 0 ... 速度被减掉了 ParID的值=0 ......速度不被减去 |
本节的主题: