该功能块可用于将一个从轴带入到设定的速度比(在 "RatioNumerator "和 "RatioDenominator "输入上指定)跟随主轴。
与MC_GearIn 功能块相比,该功能块提供了以下额外的功能 :
•选择是否在启动耦合、改变齿轮比和/或停止时 而不进行补偿
•设置补偿的加加速时间(jerk time )
•更准确地划分齿轮比的等级
•有可能在一个已经执行中的达到目标齿轮比的补偿运动中,再次也改变目标齿轮比(就是在从轴补偿运动中 更新跟随速比)
使用要求
•SG3/SGC目标系统的功能块名称 MC_087BR_GearIn
允许启用该功能块的PLCopen轴状态
•静止状态
•离散运动
•连续运动
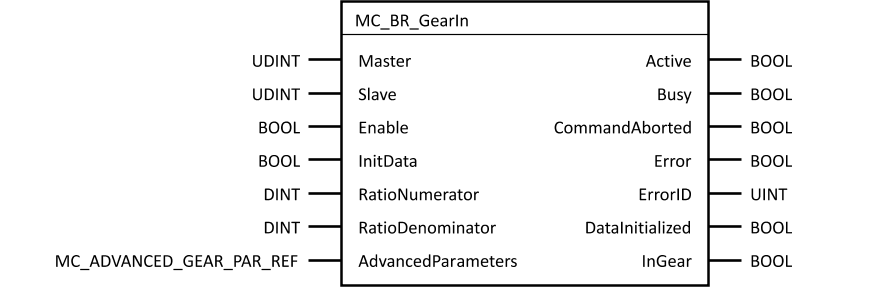
功能块
参数
输入/输出 |
参数 |
数据类型 |
说明 |
IN |
Master |
UDINT |
主轴 轴参考引用 |
IN |
Slave |
UDINT |
从轴 轴参考引用 |
IN |
BOOL |
只要这个输入被设置,功能块就处于活动状态。 |
|
IN |
InitData |
BOOL |
在上升沿初始化输入数据(功能块输入数据的在线更新) |
IN |
RatioNumerator |
DINT |
齿轮比分子(从轴系数) |
IN |
RatioDenominator |
DINT |
齿轮比分母(主轴系数>0) 注意: 分母只允许大于0的值。 |
IN |
AdvancedParameters |
MC_ADVANCED_GEAR_PAR_REF |
额外的高级输入参数,可选择与功能块一起使用。 |
OUT |
Active |
BOOL |
功能块激活,可以执行运动 |
OUT |
Busy |
BOOL |
该功能块处于活动状态,必须继续调用。 |
OUT |
CommandAborted |
BOOL |
功能块被另一个功能块中止了 |
OUT |
Error |
BOOL |
执行过程中出现错误 |
OUT |
ErrorID |
UINT |
|
OUT |
DataInitialized |
BOOL |
对功能块输入的改变被初始化 |
OUT |
InGear |
BOOL |
以指定的速度比启动齿轮联轴器 |
表: 参数 MC_BR_GearIn
MC_ADVANCED_GEAR_PAR_REF 数据类型
参数 |
数据类型 |
描述 |
Acceleration |
REAL |
主轴恒定速度运动下的从轴进入跟随和跟随速比变更时的加速度[从轴PLCopen单位/s²](不一定达到这个加速度值)
注意: 如果指定值为 "0",那么该功能块将使用从轴的极限值。 |
Deceleration |
REAL |
在主轴恒定速度运动下,禁止(disabling)功能块之后结束从轴运动的减速度[从轴PLCopen单位/s²](不一定达到这个减速度值)
注意: 如果指定值 "0 "或大于轴减速度的极限值,那么功能块将使用从轴的极限值。 |
JoltTime |
REAL |
用于补偿的加加速时间(0.0 - 10.0)[s]
注意: 如果指定值为 "0",那么功能块将使用从轴的极限值。 |
CompensationSelector |
USINT |
在启动耦合、齿轮比变化和停止时,可以单独启用或者是禁用 为了实现速度转换的补偿齿轮的使用(就是要不要补偿段) |
MasterParID |
UINT |
这个ParID被用来代替主轴的设定位置;0...使用设定位置
注意: 当使用0以外的值时(即使是位置ParID),主轴的PLCopen系数不应用于涉及主轴的任何参数。 |
MasterMaxVelocity |
REAL |
如果同时为 "MasterParID "指定一个值: MasterParID值的最大速度 如果没有为 "MasterParID "指定一个值: 主轴的最大速度[主轴的PLCopen单位] 如果该参数为 "0",则使用 "Enable "或 "InitData "输入的上升沿时主轴的当前速度。
注意: 该值用于计算耦合、改变齿轮比或凸轮以及切割区之间的补偿运动(取决于功能)。 这个参数对ACOPOS错误 37113:"凸轮补偿齿轮。超过了极限值" 的发生有相当大的影响。
没有指定数:主轴速度改变或通过 "InitData "或 "Execute "进行的参数更新会导致不同的、自动计算的运动曲线。 指定值:指定从轴在与主轴耦合时,主轴达到的最大速度值,会导致自动计算的运动曲线始终相同。 |
本节的主题: